●駕駛表現(xiàn)
我們的測(cè)試車采用前麥弗遜式獨(dú)立懸架,,后多連桿式獨(dú)立懸架,。在PHEV車型上標(biāo)配的FSD電控阻尼減振器并沒(méi)有出現(xiàn)在純電版車型上,但這輛車的底盤表型依然不會(huì)讓你失望,。
汽車 騰勢(shì)X 2020款 純電旗艦版")
汽車 騰勢(shì)X 2020款 純電旗艦版")
汽車 騰勢(shì)X 2020款 純電旗艦版")
懸架的調(diào)校依然是舒適取向,,整體偏軟,但初段有一定韌性,。小幅振動(dòng)能夠從容應(yīng)對(duì),較大的顛簸或起伏也處理的不錯(cuò),,沒(méi)有多余晃動(dòng),。高速并線或過(guò)彎時(shí)的安定感不錯(cuò),側(cè)傾控制比較到位,。
汽車 騰勢(shì)X 2020款 純電旗艦版")
純電版車型配備了博世舒適制動(dòng)功能,,就是設(shè)置界面里的“舒適停車”,它的作用是緩解剎車時(shí)的點(diǎn)頭現(xiàn)象,。日常駕駛時(shí)緩踩剎車,,這套系統(tǒng)的作用還是比較明顯的。另外,車輛剎車踏板的回饋力度分為標(biāo)準(zhǔn)和舒適兩種模式,,但實(shí)際體驗(yàn)感覺(jué)變化不算明顯,。
汽車 騰勢(shì)X 2020款 純電旗艦版")
轉(zhuǎn)向力度同樣分為兩種模式,實(shí)際體驗(yàn)有差別,,但都很輕,,轉(zhuǎn)向最大的優(yōu)點(diǎn)是指向精準(zhǔn),車頭的反應(yīng)速度也比較快,。不過(guò)方向盤路感有些過(guò)于豐富,,底盤過(guò)濾掉的振動(dòng)又通過(guò)方向盤傳遞給駕駛員了,以這輛車型的定位而言,,其實(shí)是不需要的,。另外,如果你在轉(zhuǎn)動(dòng)方向盤的同時(shí)恰好踩下油門或趕上動(dòng)能回收介入,,那你會(huì)感覺(jué)到方向盤轉(zhuǎn)動(dòng)阻尼突然變大一下,。
●100-0km/h剎車測(cè)試成績(jī):39.39米
汽車 騰勢(shì)X 2020款 純電旗艦版")




Brembo卡鉗配打孔通風(fēng)剎車盤,這個(gè)組合看起來(lái)絕對(duì)唬人,,騰勢(shì)X(參數(shù)|詢價(jià))最終的剎車成績(jī)也比較不錯(cuò),,并且連續(xù)十次剎車的成績(jī)比較穩(wěn)定,沒(méi)有明顯的熱衰減現(xiàn)象,。不過(guò)由于騰勢(shì)X比唐新能源 EV600D重了35公斤,,導(dǎo)致硬件相同的情況下,剎車距離略長(zhǎng),。
●噪音測(cè)試



騰勢(shì)X的噪音測(cè)試表現(xiàn)還算不錯(cuò),沒(méi)有發(fā)動(dòng)機(jī),,馬牌ContiSportContact 5輪胎的噪音也不大,。只是速度超過(guò)90km/h后,風(fēng)噪會(huì)變得愈發(fā)明顯,,所以在120km/h的測(cè)試中,,噪音已經(jīng)超過(guò)了我們的推薦值。
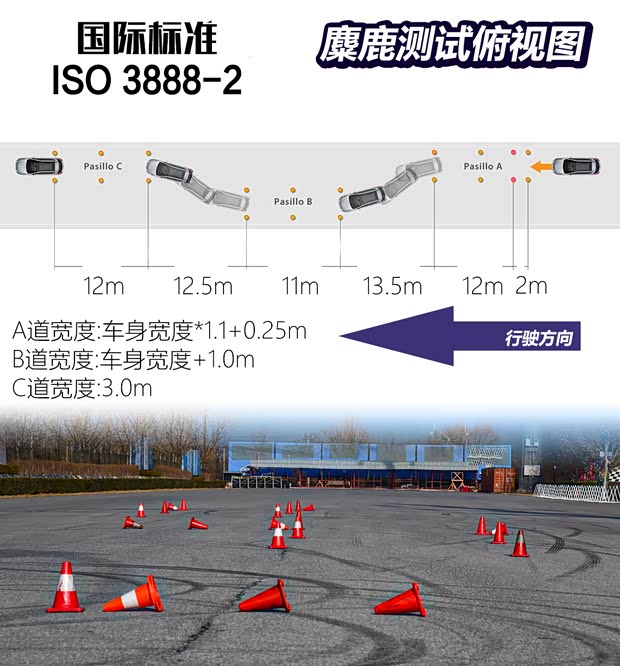
●麋鹿測(cè)試
麋鹿測(cè)試按照國(guó)際ISO 3888-2麋鹿測(cè)試標(biāo)準(zhǔn)進(jìn)行樁桶擺放(具體擺放方式與樁桶間距如圖),,測(cè)試車輛僅有駕駛員一人,,為空載模式。
由于麋鹿測(cè)試的表現(xiàn)與駕駛員駕駛技術(shù)有直接關(guān)聯(lián),,因此本次麋鹿測(cè)試我們的駕駛員為評(píng)測(cè)導(dǎo)購(gòu)組的專業(yè)車手——林琦,。測(cè)試時(shí),我們從時(shí)速65km/h開(kāi)始,,每個(gè)速度級(jí)增加5km/h,,以此類推,。每個(gè)速度級(jí)如果嘗試3次沒(méi)有通過(guò),且駕駛員判斷車輛無(wú)法通過(guò)該速度級(jí)(盡可能保證安全),,測(cè)試將終止,。
汽車 騰勢(shì)X 2020款 純電旗艦版")
騰勢(shì)X的轉(zhuǎn)向很輕,但指向特別準(zhǔn),,這就讓駕駛員能夠更精準(zhǔn)的控制行車路線,,并且由于電池組固定在車底,雖然車重但重心很低,,所以感覺(jué)車身并不遲鈍,。電子輔助系統(tǒng)的介入是一個(gè)循序漸進(jìn)的過(guò)程,開(kāi)始很輕,,慢慢力度逐漸加強(qiáng),,這一點(diǎn)感覺(jué)很好。騰勢(shì)X在B區(qū)后半段呈現(xiàn)出推頭的姿態(tài),,隨著重心的轉(zhuǎn)移,,逐漸變成甩尾,最后進(jìn)入C區(qū),,2.33噸的車重還是給克服慣性與重心轉(zhuǎn)移造成了麻煩,,不過(guò)最終表現(xiàn)值得肯定。騰勢(shì)X最終通過(guò)麋鹿測(cè)試的速度為74km/h,。
