[汽車之家 專業(yè)評測] 測完城市領(lǐng)航輔助之后,很多觀眾朋友反饋說,,這功能看著酷炫,但是用著受罪,,可以嘗鮮,,但不夠?qū)嵱谩<热怀鞘胁粔驅(qū)嵱?,那就安排更實用的測試,,高速NOA測試走起。

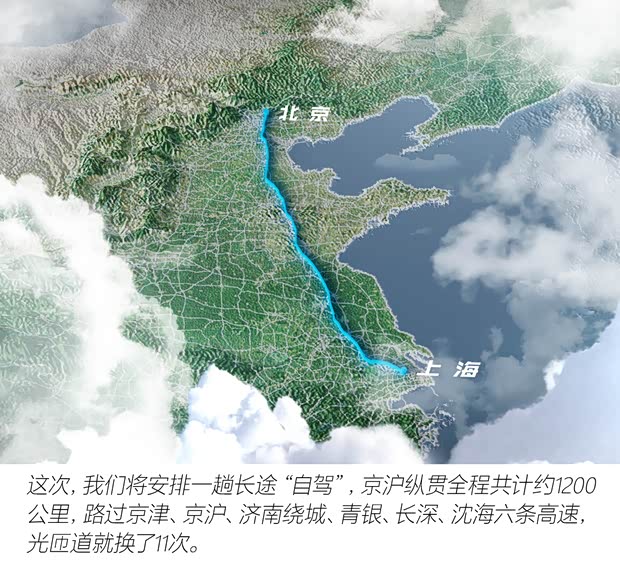
為什么這么繞,?因為只有匝道多,、路況復(fù)雜、場景豐富,,智駕的優(yōu)勢和問題才暴露得更徹底,。這次我們依然會按照:輔助能力、可信賴度,、交互友好度,、場景應(yīng)對、安全策略這五大方面,,由表及里地分析他們的表現(xiàn),。




三輛車統(tǒng)一按照“全自動、高效率,、最安全,、不超速”的測試指導(dǎo)精神進行設(shè)置,我們的測試員也做好了心理建設(shè),,只在千鈞一發(fā)的時刻再動手介入,。

ADS 2.0、DiPilot300,、IM OS 3.0,,三套系統(tǒng)的高速領(lǐng)航輔助比拼,馬上開始,。
【測試結(jié)果分析】【整體指標】
從早9點到凌晨1點,,整整16個小時的鏖戰(zhàn),經(jīng)歷了白天,、黑夜,、降雨、施工,、大車,、遺撒等等工況,,還有各種彎彎繞繞的大曲率匝道。
這次的高速領(lǐng)航輔助體驗,,全程有不少看點,,開不了的路段基本沒有,接管的次數(shù)也明顯少了,。



三輛車細節(jié)的差異,,我們結(jié)合幾個典型場景來逐個分析。
【場景分析】
以前測智駕,一見樁桶我就心慌,,這次終于感覺踏實了一點了,。雖然領(lǐng)航輔助對施工場景的處理還不是天衣無縫,但總歸是能化險為夷了,。

施工導(dǎo)致的車道減少往往還會帶來前車急剎,,智駕的跟車減速應(yīng)對也比較及時。
除了這些常規(guī)的,,阿維塔還做出一個驚為天人的操作,,這段剛修好的路左側(cè)樁桶還沒撤,大家都在僅剩的一條車道慢慢開,。

進出匝道,,也是高速最常見的工況。三輛車進匝道的時機選擇類似,,會根據(jù)橫向間隔的車道數(shù)量,,提前1公里以上就發(fā)起變道。

騰勢則是盡顯實誠人本色,,嚴格遵守限速,,即便因為壓車被后車催促,也只是打開雙閃表明態(tài)度,。
另外在匝道中,,能明顯感到智駕的動作不如在主路上那么自信,比如阿維塔,,會更頻繁的修正方向,。這可能是因為匝道上是完全無圖的狀態(tài),而主路上還是利用了一部分高精地圖數(shù)據(jù)的原因,。
三,、學(xué)會和大車打交道,是每個司機必會的高速保命手段,。
我們來看看這三臺車的表現(xiàn),。



四、除了大車,,心血來潮突然變道的任性司機,,也是高速上必須提防的風(fēng)險因素。對于這種極限加塞的Cut in 工況,,三輛車腦子轉(zhuǎn)的也確實快,,除了騰勢有一次感覺猝不及防,讓駕駛員搭了把手,,其余的處理都是有驚無險,。
五、最后一個,,也是目前版本T0級難度的場景,,道路上遺撒的障礙物。盡管三位選手都配有激光雷達,,并且或多或少有一定的異形障礙物識別能力,,但是在面對道路中間的未知障礙時,他們的選擇都不盡如人意

智己對地面上的泡沫板也無動于衷,。
以上種種,,反映出智駕依然缺乏對真實物理世界的理解,所以這里又得插播我們的安全提示小廣告:智駕無情,,并非全能,,及時接管,平安出行,。
【體驗分析】
場景說完了,,看來只從功能上,不同的智駕系統(tǒng)有點拉不開差距了,,所以接下來考驗升級,,讓我們從好不好用的層面比一比。


注意啊,,以上這些都是發(fā)生在我們設(shè)置車速偏移為零的前提下,。
不過老司機都知道,高速開的快不在于絕對車速,,及時躲開慢車,,靈活變道更加重要。這方面阿維塔最積極,,特別是遇到堵車,,有空就鉆,這種策略有時候管用,,但也有時候不靈,,比如也會存在 造成了很多無效變道,。


這幾輛車還有些特點,值得講一下,。



除了以上這幾個我們雞蛋里挑骨頭找出來的小瑕疵,,其實在整個的人車交互體驗上,無論是文字提示,,語音播報,,還是儀表和中控上的環(huán)境渲染界面,三輛車都已經(jīng)做的很趨于成熟了,。
【結(jié)論】
懶是科技進步的第一驅(qū)動力,,跑高速適應(yīng)了智駕的便捷體驗,再讓我自己開,,都有點不習(xí)慣了,。經(jīng)過這1200公里的深度測試,我們也可以負責(zé)的說,,高速領(lǐng)航輔助,,不再只是配置表上的添頭,已經(jīng)蛻變成真正安全可靠,、有用好用的功能,,相信他會逐漸替代ACC和LCC功能,成為新的智駕標配,。后續(xù),,汽車之家實測季—智能篇也將跟上技術(shù)發(fā)展的腳步,用更多車型挑戰(zhàn)更高難度的線路,,歡迎持續(xù)關(guān)注(圖/文 汽車之家 冷曉陽 李健萌)