[汽車之家 資訊]2020年,,輕舟智航推出了第一代專注城市復雜交通場景的自動駕駛解決方案「Driven-by-QCraft」,適應于城市公開道路上的多種復雜路況,,并可高效部署于多類車型,。
在過去兩年多中,「Driven-by-QCraft」快速迭代,,持續(xù)升級,,并在今年5月推出了最新一代的車規(guī)級前裝量產(chǎn)自動駕駛方案,助力車企實現(xiàn)城市NOA方案的全面落地,。

☆來自詩人李白,,輕舟智航自動駕駛品牌名稱正式發(fā)布
今天,輕舟正式將其自動駕駛解決方案「Driven-by-QCraft」命名為「輕舟乘風」,,它涵蓋車載軟件,、車載硬件和數(shù)據(jù)自動化閉環(huán)等多個方面,可以提供輕舟智航最前沿的感知,、PNC等能力,,為最終用戶帶來更安全、更便捷,、更舒適的體驗,。
「輕舟乘風」取自詩句「長風破浪會有時,直掛云帆濟滄?!?。這兩句詩出自唐代詩人李白的《行路難》,,表達的是一種歷經(jīng)坎坷,但仍然無比堅定的信念,,也充分彰顯了輕舟智航的價值主張:基于數(shù)據(jù),,成于感知,用PNC引領(lǐng)城市NOA,;其遠景則是攜手生態(tài)伙伴,,打造使用廣闊使用范圍的自動駕駛解決方案 。
☆輕舟智航,,殺入城市NOA主賽道
城市NOA,,今年自動駕駛市場被提及最多的專業(yè)詞匯,作為專注L4自動駕駛的初創(chuàng)公司,,輕舟智航看到了其中的商機,,城市NOA需要處理的問題和L4面臨的問題非常相似,真正做好城市NOA面臨諸多難題:
傳感器和計算需要符合車規(guī)級,,由此帶來的成本,、功耗限制,需要通過更強的算法框架優(yōu)化和工程化能力來解決,;面對更廣泛的ODD使用場景,,需要通過更高效的數(shù)據(jù)利用,以數(shù)據(jù)驅(qū)動實現(xiàn)更強泛化性,;

針對城市中各種復雜的交通參與者互動和博弈場景,,需要在確保安全性的前提下,更聰明地進行預測,、規(guī)劃和控制,,實現(xiàn)更高行車效率。
因此,,城市NOA是輔助駕駛的天花板,,也是無人駕駛的入門檻。而依托L4以及robobus積累的經(jīng)驗和技術(shù),,輕舟智能針對上面的難題,,帶來了自己的城市NOA解決方案。
☆一顆激光雷達的城市NOA是當前階段最務實的方案,?
既然從L4轉(zhuǎn)戰(zhàn)L2,,那么輕舟智航的L2方案就很有看點,他們的思路很清晰,,主要圍繞單激光雷達+視覺傳感器展開,。輕舟智航的年輕工程師們認為,相較于純視覺方案,,一顆激光雷達的城市NOA可在保證安全性的前提下,,實現(xiàn)更多場景,,最優(yōu)性價比。

目前,,行業(yè)內(nèi)涵蓋多種輔助駕駛配置方案,,下至純視覺、低算力平臺的低配方案,,上至配備激光雷達,,搭載雙NVIDIA DRIVE Orin或雙地平線征程5計算平臺的高配方案。

在當前階段,,由于道路上充滿復雜多樣的障礙物和Corner Case場景,,純視覺方案很難應對中國的城市NOA需求。而激光雷達能夠提供精確的3D測距,,可以及時捕捉準確物體的位置,、形態(tài)、大小,、運動狀態(tài)等信息,便于系統(tǒng)及時做出更為安全且舒適的規(guī)避動作,,有效應對多種Corner Case難題,。

輕舟智航的城市NOA主張是在保證安全性的前提下,實現(xiàn)高性價比,。同時,,他們也認為這是當前激光雷達方案中最務實的城市NOA方案,有望更快「上車」,,推動城市NOA的快速落地,。總體來說,,輕舟智航的城市NOA也屬于輕地圖,,重感知的范疇。
至于特斯拉的純視覺路線,,可能真的不夠中國特色,。
☆多傳感器融合,輕舟智航帶來的思路夠新嗎,?
主流的融合方案包括前融合(數(shù)據(jù)級融合),、中融合(特征級融合)和后融合(目標級融合)三種。不同融合方案各有優(yōu)劣,,有效的融合結(jié)果才能給下游任務輸出可靠的信息,,為車輛做出安全的預測和決策提供保障。
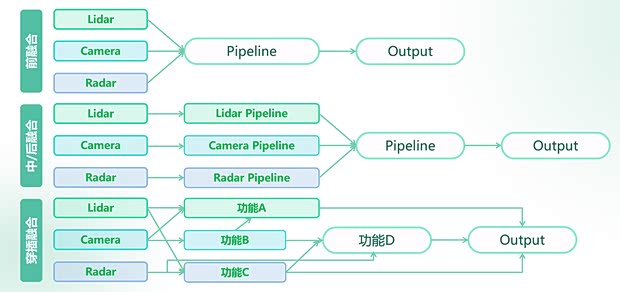
前融合可以實現(xiàn)更高質(zhì)量的融合效果,,但對于不同傳感器的時間同步性和空間標定的要求非??量?。而后融合的解耦性更強,但依賴經(jīng)驗豐富,、工程素養(yǎng)良好的工程人員編寫基于經(jīng)驗的規(guī)則,,同時需要大量的仿真、實車測試以獲得更廣的覆蓋度,,并且可擴展性有限,,工程投入邊界收益低。
輕舟智航的感知算法通過「前中后穿插融合」,,通過激光雷達,、毫米波雷達、視覺等多傳感器融合,,感知模型可在不同階段充分利用不同傳感器信息,,讓不同傳感器優(yōu)勢互補,可以避免單模信息丟失,,實現(xiàn)更早的多傳感器信息共享,,得到更優(yōu)傳感器融合結(jié)果,從而可以更準確更精細地感知動靜態(tài)物體及狀態(tài)信息,,避免各類誤檢和漏檢,,精度高且魯棒性強。
既然說到感知,,接下來我們自然而然就應該聊到感知方案,。就像前段時間小鵬汽車在科技日上推出的Xnet多相機、多幀數(shù)據(jù)輸入方案,,輕舟智航OmniNet也是類似的方案,。
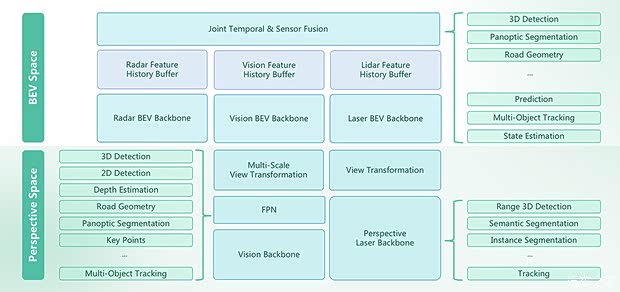
以一個神經(jīng)網(wǎng)絡即可實現(xiàn)視覺、激光雷達,、毫米波雷達在BEV(Bird’s Eye View)空間和圖像空間上輸出多任務結(jié)果,。相較傳統(tǒng)方案,OmniNet在實際應用中可節(jié)省2/3的算力資源,,并擁有更高的感知融合精度和模型迭代效率,,而且可以低成本適配不同廠家的傳感器配置,更輕量,、更高效,、更靈活地滿足城市NOA的量產(chǎn)需求。
輕舟智航此次提出的OmniNet是應用于前中融合階段,、實現(xiàn)數(shù)據(jù)/特征融合的全任務大模型,,也是首個可在量產(chǎn)計算平臺上實現(xiàn)時序多模態(tài)特征融合的大模型。利用一個神經(jīng)網(wǎng)絡模型,將視覺,、毫米波雷達,、激光雷達等數(shù)據(jù)通過前融合和BEV空間特征融合,讓本來獨立的各個計算任務通過共享主干網(wǎng)絡(backbone)和記憶網(wǎng)絡(memory network)進行高效多任務統(tǒng)一計算,,最終同時在圖像空間和BEV空間中輸出不同感知任務的結(jié)果,,為下游的預測和規(guī)劃控制模塊提供更豐富的輸出。
☆城市NOA時代,,PNC定高下,?
PNC,又一個自動駕駛領(lǐng)域的名詞,,它的全稱是Planning and Control,,在車端涵蓋導航、預測,、決策,、規(guī)劃、控制等核心模塊,,以及HMI,、環(huán)境感知、地圖定位等支持模塊,。
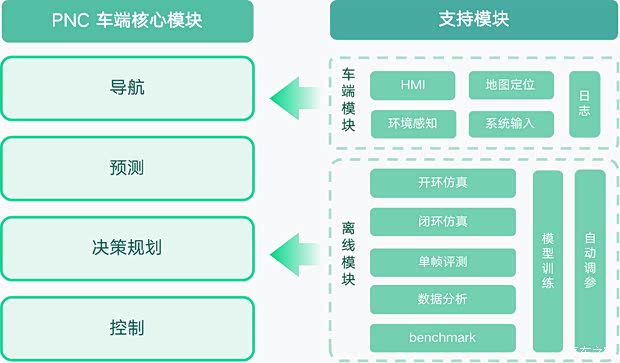
PNC的離線模塊可以收集,、查詢、測試數(shù)據(jù),,訓練模型,,通過仿真分析模型和算法效果,,最后再將模型和算法效果反哺給車端模塊,。簡單的說,它就是打磨城市NOA的訓練場,,在這個訓練場,,輕舟智航可以更迅速且精準的完成對NOA的基礎(chǔ)功能訓練和特殊場景升級,從新手快速成長為老司機,。
☆獨家的時空聯(lián)合規(guī)劃
通常來說,,業(yè)界采用的是「時空分離規(guī)劃」,也就是把「對軌跡的規(guī)劃」拆分成兩個子問題,,即路徑規(guī)劃(path planning)和速度規(guī)劃(speed planning),。路徑規(guī)劃對應于橫向控制,即方向盤,;速度規(guī)劃對應于縱向控制,,即剎車或油門,這種決策機制也就是通常所謂的「橫縱分離」。
「時空分離規(guī)劃」相當于先為車輛「鋪好」一段鐵軌,,再在鐵軌上計算速度,。這種方式非常依賴手寫規(guī)則調(diào)整車輛行為,也非常依賴大量路測來驗證算法,。
輕舟智航自研「時空聯(lián)合規(guī)劃算法」打破了思維定勢,,同時考慮空間和時間來規(guī)劃軌跡,而不是先單獨求解路徑,,在路徑基礎(chǔ)上再求解速度從而形成軌跡,。將「橫縱分離」,升級為「橫縱聯(lián)合」,,能直接在x-y-t(即平面和時間)三個維度的空間中直接求解最優(yōu)軌跡,。
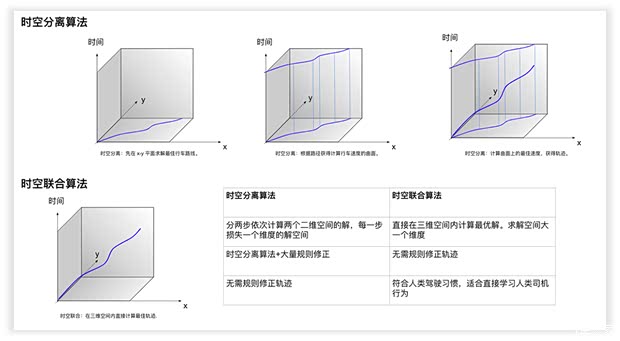
同時考慮空間和時間的「時空聯(lián)合規(guī)劃算法」,也是公認的更優(yōu)的規(guī)劃算法,,更適合國內(nèi)復雜的路況,。
這種策略讓車輛在行駛時,能夠比普通駕駛員甚至老司機「開得更好」,,特別是在面臨動態(tài)障礙物的交互時,,能提前把握最好的時機,選出最佳行車軌跡,,更流暢地完成車輛間的博弈,,并且不會出現(xiàn)反復急剎的情況。
不僅如此,,在多車道行駛時,,車輛還可以通過判斷前方車流量和車速,靈活地變道選擇更快的路線,,而不會「死板地」跟著前車緩行,。更聰明、更靈活,,行車效率更高效,。
因此,采用「時空聯(lián)合規(guī)劃」的車輛,,可在保證安全性的基礎(chǔ)上,,用更短時間、更舒適的體驗,,把乘客帶向目的地,。而且越是在復雜的路況環(huán)境中,越能帶來更為顯著的效率和體感提升,。
寫在最后:
從目前的情況看,,輕舟智航已不再單純是一家做Robobus的L4自動駕駛公司,更是在快速推進自動駕駛前裝量產(chǎn),同時它也有成為最好的自動駕駛解決方案供應商的野心,。
而隨著越來越多供應商入局城市NOA,,輕舟智航也面臨的很多挑戰(zhàn)。不可否認,,L4級自動駕駛積累的技術(shù)經(jīng)驗,、PNC、感知融合模型等技術(shù)確實給了它競爭的資本,,但更快的被車企認可,,拿下更多前裝訂單,依然是當務之急,。好消息是輕舟智航已經(jīng)拿下了某家車企的訂單,,而它的產(chǎn)品也即將亮相,最終能否贏得消費者的青睞,,也將成為輕舟智航的“期末考試”,,我們一起期待吧。(圖/文 汽車之家 冷曉陽)
