○ 防追尾制動(dòng)測試

從難易程度來講,,防追尾制動(dòng)測試的目標(biāo)個(gè)體更大,,并且充氣模型還具備金屬反射結(jié)構(gòu),對于很多車而言,,在這一項(xiàng)表現(xiàn)良好是理所應(yīng)當(dāng)?shù)模啾容^假人測試它應(yīng)該算比較容易通過的項(xiàng)目。然而全新寶馬5系在應(yīng)對這一項(xiàng)測試的時(shí)候,,似乎出現(xiàn)了一些狀況,。


我們在10km/h測試的情況下,該車竟然沒有任何報(bào)警提示和剎車動(dòng)作,,而后我們在翻閱說明書的過程中也沒有發(fā)現(xiàn)任何標(biāo)注該系統(tǒng)速度下限的文字,,并且從車內(nèi)交互系統(tǒng)(iDrive)來看,該AEB系統(tǒng)也確實(shí)處在待命工作的狀態(tài),,這讓我們十分疑惑,。難道是系統(tǒng)失靈了?出現(xiàn)故障了,?之后我們慢慢提高車速,,發(fā)現(xiàn)到15km/h的時(shí)候,這套主動(dòng)剎車系統(tǒng)才開始有效執(zhí)行剎車工作,。
并且在我們逐步提高車速的過程中,,我們發(fā)現(xiàn)雖然在15km/h和20km/h兩個(gè)速度下雖然也能執(zhí)行完全剎停工作,但發(fā)生輕微碰撞的概率較大(基本上是在1-5km/h的速度下發(fā)生碰撞),,然而當(dāng)速度繼續(xù)提高,,該車的主動(dòng)剎車系統(tǒng)反而能夠執(zhí)行穩(wěn)健的主動(dòng)剎車功能,并且極少發(fā)生碰撞,。直到提升至50km/h的情況下,,該車再一次與充氣模型產(chǎn)生較大概率的輕微碰撞,但速度得以有效降低,。
從駕駛員角度來說,,這套系統(tǒng)似乎在30km/h的情況下出現(xiàn)了一個(gè)“分水嶺”:當(dāng)?shù)陀谶@一車速時(shí),該車會(huì)在離充氣模型5m左右的位置執(zhí)行聲音和HUD抬頭顯示位置的報(bào)警,,同時(shí)安全帶張緊,,而后在2m左右的位置時(shí)執(zhí)行十分線性的輕柔剎車,并由輕到重,,直到剎停,;而若大于等于這一車速的時(shí)候,該車會(huì)在更遠(yuǎn)的距離(10-15m左右)執(zhí)行聲音和HUD報(bào)警,,而在5-7m左右的時(shí)候,,該車會(huì)執(zhí)行安全帶迅速張緊并線性急剎車,雖然還是由輕到重的過程,,但能夠明顯感覺到其制動(dòng)力在最后一刻要大于之前,,并且剎車漸進(jìn)過程也要迅速很多??傮w來說,,這可能是我們測過的剎車“最溫柔”的一臺車了。
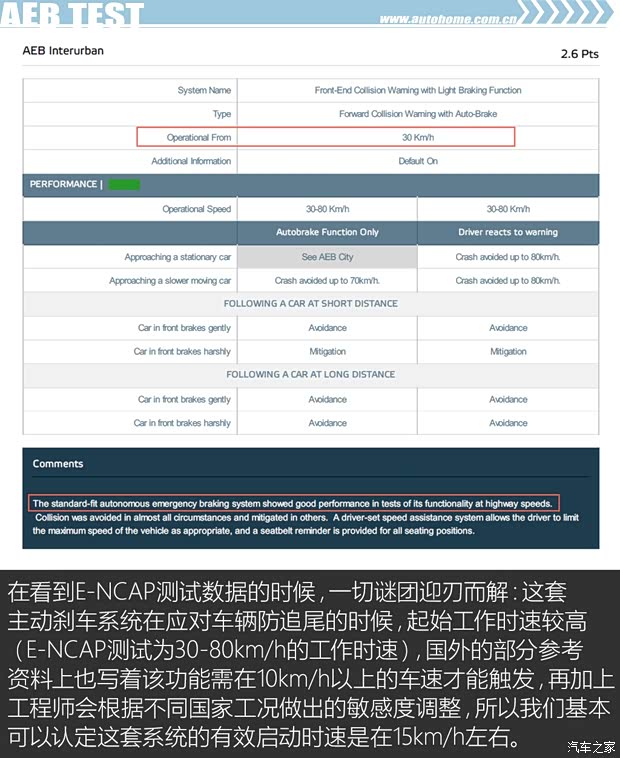
可能有人會(huì)問了:我們之前似乎沒有見過這樣的主動(dòng)剎車邏輯?。看_實(shí),,在我們的測試體系當(dāng)中,,這是第一臺“中速取向”,也就是在30-45km/h時(shí)發(fā)揮更加穩(wěn)定的主動(dòng)剎車系統(tǒng),。也許你覺得我這么說是在為其找借口,,那么我可以告訴你,,E-NCAP也是這么評價(jià)的,。這樣的工作邏輯有可能是出于低速誤觸發(fā)率和舒適性考慮的,,要不然它也不會(huì)作出“線性輕柔剎車”這樣的動(dòng)作,,但這樣的結(jié)果也似乎在告訴我們一個(gè)事實(shí):不要過度依賴于這些主動(dòng)安全系統(tǒng),,它們有局限性,,安全駕駛還是要靠自己。
○ 行人探測測試

由于在防追尾測試當(dāng)中,全新寶馬5系的AEB啟動(dòng)速度略高,,并在低速的情況下執(zhí)行線性剎車過程,這讓我們不免對其在行人測試項(xiàng)目上捏了一把汗,,它能否在30km/h的情況下及時(shí)完成識別工作,,并順利剎停呢?
場景1:靜止行人探測測試

當(dāng)面對假人測試的時(shí)候,該車展現(xiàn)出了與之前完全不一樣的狀態(tài),。如果將防追尾測試的狀態(tài)比喻成“沒睡醒”,那么它在假人測試當(dāng)中就是“完全興奮”,。能到多么“興奮”的狀態(tài)呢,?看下圖。

這一狀態(tài)讓我也感到比較意外,。雖然說識別車和人的能力不算什么,,但針對車和人卻要展現(xiàn)出完全不同的兩套工作邏輯還是第一次碰到:在面對車的時(shí)候,,它展現(xiàn)出了一定程度的寬容,,而在面對人的時(shí)候,卻絲毫不留情的馬上急剎車,,效果更好,。
場景2:模擬行人橫穿馬路測試

不僅是固定假人測試展現(xiàn)出了這樣的狀態(tài),,在面對移動(dòng)假人時(shí),,只要車輛發(fā)現(xiàn)假人移動(dòng)并計(jì)算出可能發(fā)生碰撞,便同固定假人一樣“臨門一腳”,,執(zhí)行有效的剎車工作,,并且還有一定的富余距離(1m左右)。
場景3:模擬“鬼探頭”測試

在執(zhí)行理論難度最高的模擬“鬼探頭”測試時(shí),,車輛一旦靠近,,只要假人“一露頭”,,車輛便開始報(bào)警+急剎車,保證車輛絕不撞上假人,。整個(gè)過程穩(wěn),、準(zhǔn)、狠,,一氣呵成,。
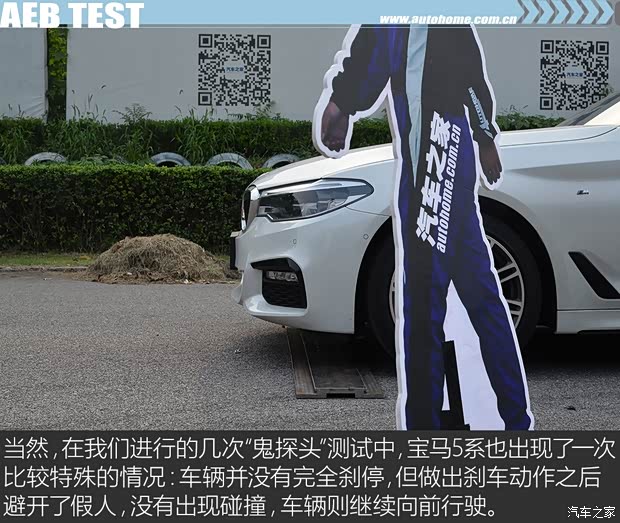
當(dāng)該車判斷假人已經(jīng)越過車頭邊緣,,也就是假人已經(jīng)走過車頭的情況下,,車輛會(huì)計(jì)算并認(rèn)定其正面撞不到假人,而后會(huì)緩慢釋放剎車,,讓車輛繼續(xù)保持正常行駛,。

編輯總結(jié):

不知不覺中,,我們的測試來到了第8期,,在這期間,來自各個(gè)國家,、各個(gè)價(jià)位的車型都被我們“撞了個(gè)遍”,。作為該測試項(xiàng)目的主要測試者,,我突然發(fā)現(xiàn)一個(gè)問題:雖然它們都會(huì)聲稱自己有AEB功能,但究竟好不好用就另當(dāng)辯論了。不見得越“高級”的車,它的主動(dòng)剎車表現(xiàn)就越好,,并且每個(gè)品牌的車型在AEB系統(tǒng)執(zhí)行邏輯上也展現(xiàn)出了很大差異,不一樣的執(zhí)行邏輯可以體現(xiàn)出每個(gè)品牌不一樣的設(shè)計(jì)理念,。對此你有沒有一些自己的見解和看法,?歡迎來我的微博(@瓦罐寧子)與我一起交流。(文/圖 汽車之家 舒寧)
