[汽車之家 輔助駕駛系統(tǒng)體驗] 在2020年的百度世界大會上,百度公布了一段與威馬汽車合作開發(fā)的AVP自動泊車演示視頻,當時我的同事對其進行了搶先體驗,。今天我們又來到了威馬汽車的“老家”湖北星暉新能源智能汽車生產(chǎn)基地,趁著威馬這款全新純電動SUV量產(chǎn)下線,,再一起看看“自動泊車”究竟好不好用。

威馬這款全新中型純電動SUV即此前威馬EVOLVE(參數(shù)|詢價)概念車的量產(chǎn)版本車型,,該車被命名為“W6”(下文稱其為威馬W6),。至于AVP自動泊車,其全稱為“云端智能無人泊車系統(tǒng)”(Cloud AVP),,這套百度與威馬汽車合作開發(fā)的自動泊車系統(tǒng)分為兩種落地場景:一個是類似商場或者寫字樓的那種商業(yè)停車場;另一個是自己家或者公司那種可能擁有固定車位的停車場,;前者被稱為PAVP,,后者被稱為HAVP。

在2020年,,我的同事在地下停車場體驗了PAVP部分的內(nèi)容,,感興趣的朋友可以移步閱讀:《2021就能量產(chǎn)?體驗威馬AVP自動泊車》,。而今天我們在地上停車場體驗了HAVP的內(nèi)容,,也就是您在家中或公司停車場會用到的部分,相信HAVP的應用頻率也會更高一些,。同時據(jù)官方透露,,HAVP在新車量產(chǎn)交付時配備,而PAVP功能將在后期通過OTA實現(xiàn),。額外提示,,官方稱我們此次體驗到的HAVP自動泊車系統(tǒng)可能與最終對用戶交付的版本有不同,目前技術人員還在對這套系統(tǒng)不斷進行優(yōu)化,。
首先關于硬件部分,,威馬W6全車共配備了7個攝像頭、5個毫米波雷達以及12個超聲波雷達,,這些傳感器都會被用于AVP,,各種傳感器相互配合、相互作為冗余,,以在更大程度確保自動泊車的安全,。

開門見山,,我們直接聊聊這套HAVP的操作流程、體驗如何,,以及這套自動泊車系統(tǒng)還有什么需要優(yōu)化的問題,。
『威馬汽車HAVP自動泊車演示視頻』
●HAVP如何實現(xiàn)自動泊車
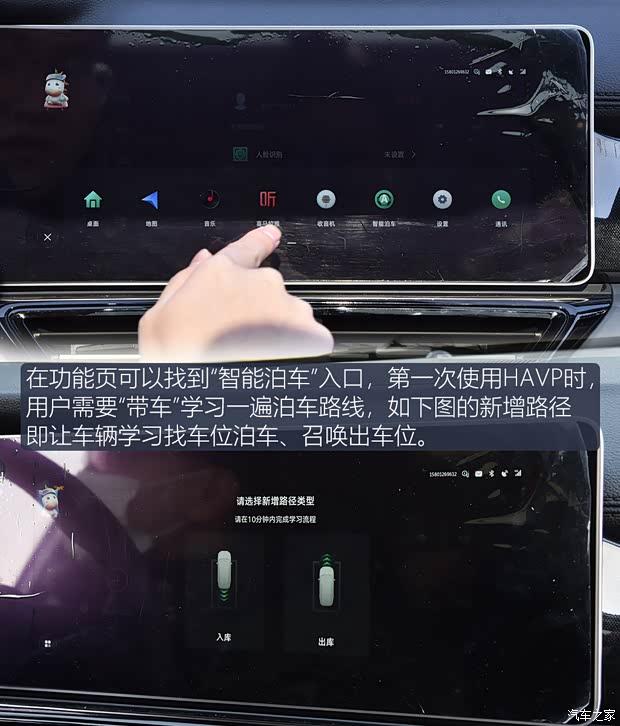
○HAVP的學習路線過程
HAVP可實現(xiàn)被召喚出車位(出庫),、自主找車位停車(入庫)兩個動作,;但在首次使用HAVP時,車輛需要一個學習過程,,即用戶需要手動駕車從車位駛出到上客點(出庫),、從下客點到車位(入庫)。所謂學習過程,,你可以理解為“人帶車學習一遍路線”,,也就是車輛記錄、上傳用戶的行駛路線,;當車輛真正進行自動泊車時,,車輛會復刻用戶此前的行駛路線,從而完成自動泊車的入庫,、出庫動作,。


剛才我們說過,車輛在進行自動泊車時會復刻用戶此前的“學習路線”,。我們在封閉路段特意嘗試了一下,,即便用戶在帶領車輛學習時有跨黃線、在馬路上“畫龍”等不正常的駕駛行為,,車輛也會完全復刻這些行駛路線,、行為。所以用戶需要注意,,在車輛“學習路線”時您要保證合規(guī)駕駛,,以免車輛在自動泊車過程中發(fā)生不必要的危險。

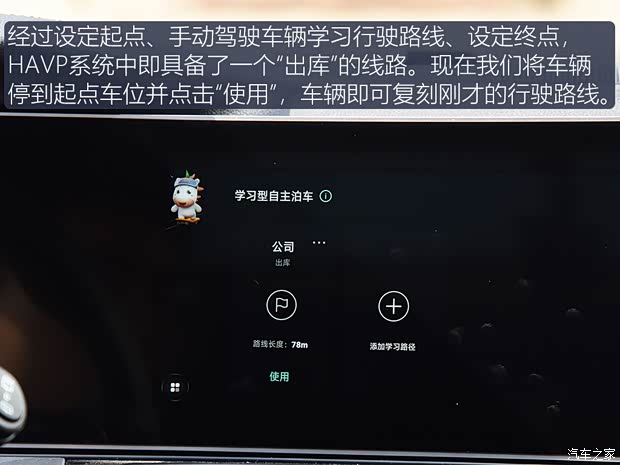
出庫和入庫兩個學習過程相同,,我們就不再展示入庫的學習過程了,。考慮到用戶的多個可用車位場景,,目前HAVP自動泊車系統(tǒng)最多支持儲存5條線路,,相信已經(jīng)能滿足大部分用戶的需求了。線路學習過程沒什么問題,,因為這基本是靠用戶手動完成的,,車輛端的完成率、效率都表現(xiàn)不錯,。但在真正的車輛自動泊車過程,,有一些問題暴露了出來,。
○HAVP的自動泊車過程
在車輛自動泊車時,第一個不太符合駕駛員實際駕駛的情況就是車輛行駛速度稍慢,。當然,,在目前這些具備“自動召喚”、“自動泊車”功能的車型中,,絕大部分車型的行駛速度都比較慢,,畢竟要保證安全第一,而且很多停車場的限速也都在10km/h甚至5km/h以下,,所以車輛行駛速度慢似乎也無可厚非,。

在車輛轉彎時,車速甚至會低至5km/h以下,。我們的演示路線會經(jīng)歷一小段逆光路段,,同時路面有路燈桿的影子,車輛每次經(jīng)過這段路時的車速都會在2-3km/h左右,,也就是一個成年人走路的速度都能比車輛的行駛速度快,。經(jīng)過向官方技術人員詢問,官方稱這可能是逆光,、影子對車輛視覺系統(tǒng)造成了影響,,畢竟要保證安全第一,所以車輛會將車速降的比較低,。但在真實應用場景中,如果后方有其它社會車輛的話,,場面可想而知......
最后讓人比較欣慰的一點是,,車輛泊入車位時的完成率很高,基本每次都能比較正的停進目標車位,,而且即便駕駛員在手動演示時車輛沒有停正,,車輛自動泊車時也能將車停正。

當然,,駕駛員在車里進行自動泊車操作顯然不符合實際用戶應用場景,,在威馬汽車的手機互聯(lián)App中,用戶可進行遠程操作,,真正使車輛實現(xiàn)“召喚”,、“自動泊車”。在用手機App進行遠程操作時,,如果用戶發(fā)現(xiàn)車輛周邊有異常情況,,松開手機屏幕,車輛即可停止行駛,;如果車輛在自動行駛時檢測到周圍有障礙物,,車輛也會主動剎車,,當障礙物消失后車輛繼續(xù)前進,目前車輛不具備自動繞過障礙物的能力,。

App端的遠程操作也有值得優(yōu)化的部分,,比如車輛不在用戶的視線范圍內(nèi),或有其它障礙物擋住了用戶視線,,此時我們是無法判斷車輛周邊情況的,,這也就不存在及時發(fā)現(xiàn)危險、處理危險了,。車輛在進行自動泊車時,,中控屏會實時顯示全景影像界面,如果App端也能加入車輛全景影像畫面,,想必用戶監(jiān)管車輛就會更得心應手了,。
○HAVP的優(yōu)點和不足匯總
體驗完HAVP,我們先來匯總一下這套系統(tǒng)表現(xiàn)不錯的方面,。第一點就是學習過程簡單,、學習效率高;用戶在出庫時開一遍車,,入庫時開一遍車,,車輛即可完成學習,這個過程不難理解,,您可以輕松上手,,同時這個過程耗時并不長,畢竟行駛路線的距離有限,、車輛記錄/上傳線路的速度也比較快,。
第二個表現(xiàn)不錯的方面就是車輛行駛過程中安全冗余做得比較到位;這里提到的安全冗余主要指車速的控制以及車輛面對障礙物時主動剎車的能力,,至少在我體驗的多次自動泊車中,,車輛并未出現(xiàn)“嚇人”的“蜜汁操作”。
第三個表現(xiàn)不錯的方面就是車輛泊車入位能力較強,;無論目標車位兩側是否有其它社會車輛,,HAVP在停車時基本都能一次停到位,這確實要比一些駕駛員的停車能力強,。不過目前HAVP還只支持垂直車位,,斜向車位、側方停車并不支持,。
至于值得優(yōu)化的部分,,第一點還是車速;確實車速慢會更安全,,但如果您體驗了只有7km/h甚至低至2-3km/h時速的車輛行駛過程,,我不確定您還愿不愿意再用它一次,,也不確定您能不能接受來自后車的“滴滴滴滴”。
第二點值得優(yōu)化的部分是目前車輛行駛路線基本是復刻駕駛員的“教學路線”,,不知道后期車輛能否憑借自己的判斷選擇一條更優(yōu),、能繞過一些臨時障礙物的路線。
第三個值得優(yōu)化的點是車輛直行時方向盤不斷修正方向的行為,,雖然從目前來看,,這個方向盤不斷擺動的行為不會影響整體泊車過程,但如果用戶坐在車上的話,,體驗確實不佳,。
○未來PAVP的覆蓋率會如何?
HAVP只需要學習用戶的行駛路線即可,,但PAVP與之不同,。在商場或?qū)懽謽堑鹊叵萝噹熘校琍AVP要基于車庫的高精地圖來實現(xiàn)自動尋找車位,、自動上下樓層,。這也就意味著,只要你肯付出一定的時間成本,,HAVP就能在符合條件的停車場實現(xiàn)自動泊車,;但PAVP要求車輛已擁有目標車庫的高精地圖,否則無法實現(xiàn)自動泊車,。
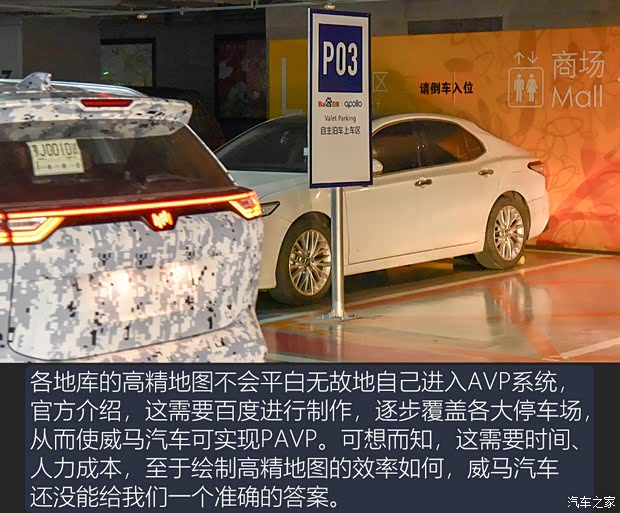

對于繪制高精地圖,,威馬汽車只是表示他們和百度會盡快完成各地庫的覆蓋,同時在用戶的日常行車中,,威馬汽車也會收集相關數(shù)據(jù),,對高精地圖進行優(yōu)化。就算有一些車庫自身具備高精地圖,,那只以北上廣等大城市為例,每個城市有多少大商場,、大寫字樓的地下車庫,?那再算上其它城市的車庫呢?至少以我目前的理解來看,,繪制高精地圖的工作量應該是非常龐大的,,這也就意味著您什么時候能在所在城市各大商場地庫用上PAVP功能好像還不確定。
總結:
目前威馬汽車的HAVP系統(tǒng)有優(yōu)點也有不足,,這當然是正常情況,,只是我們希望這套系統(tǒng)真正交付到用戶手中時能有更好地表現(xiàn)。另外,,這套自動泊車系統(tǒng)也給我們留下了很多想象空間,,比如配合無線充電技術,,車輛是不是可以實現(xiàn)自己找到車位,自行充電,?結合未來不斷提升的輔助駕駛技術,,我們是不是也解決了“最后100m”的輔助駕駛問題?我們似乎真的不需要自己駕車了,?總之,,威馬汽車這套AVP云端智能無人泊車系統(tǒng)似乎還有很多玩法,我們也期待威馬W6真正交付到用戶手中時會有什么表現(xiàn),。(文/圖/攝 汽車之家 尤冬青)
