[汽車之家 技術(shù)] 智能汽車產(chǎn)品最大的價值就是賦予了汽車不斷升級的能力,,這在十年之前甚至是不可想象的事情,。但即使有了OTA,,可以通過軟件迭代實(shí)現(xiàn)新的功能和玩法,硬件的能力始終是有上限的,。這也是為什么越來越多的主機(jī)廠喜歡預(yù)埋各種各樣的硬件,,試圖通過暫時看起來“過剩”的性能為將來更強(qiáng)大的軟件鋪路,。隨著理想汽車AD Pro版本的高速NOA功能正式上線,,我們也迎來了首次檢驗(yàn)地平線征程5系列芯片真正實(shí)力的機(jī)會。到底這顆被寄予厚望的高性能SOC扛不扛得住“旗艦”這個稱號呢,?我們借著實(shí)車體驗(yàn)的機(jī)會,,跟您分享一下它的表現(xiàn)。
○算力大,?不如算的快,!
征程5雖然數(shù)字編號是5,但卻是地平線這家科技公司的第三款車規(guī)級產(chǎn)品,。相較于征程3以及征程2個位數(shù)的單顆算力,,征程5達(dá)到了128TOPS,可謂是躍遷式的進(jìn)步,。
雖說官方對外一直宣稱征程5是“人工智能芯片”而非“自動駕駛芯片”,,但以目前的合作項(xiàng)目來看,征程5在設(shè)計(jì)之初就已經(jīng)向著自動駕駛方向進(jìn)行了不少的傾斜,。
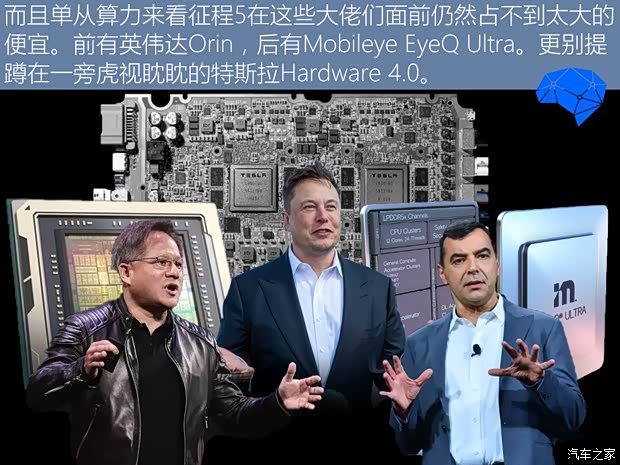
當(dāng)然,,這個賽道上不只有地平線一家公司。英偉達(dá),、英特爾Mobileye,、高通……甚至是自研芯片的特斯拉,哪一個拎出來都是一方霸主,。
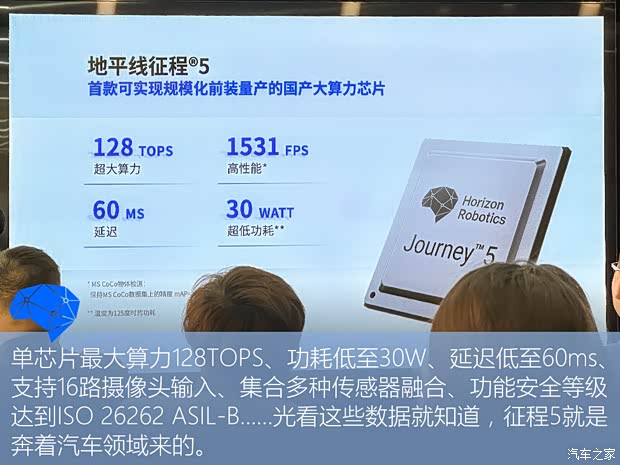
但好在,,征程5也有自己得天獨(dú)厚的有優(yōu)勢領(lǐng)域——高達(dá)1531的FPS。相信游戲玩家對這個英文縮寫都不陌生,。過低的FPS會讓游戲畫面開始出現(xiàn)掉幀現(xiàn)象,極大的影響玩家的游戲體驗(yàn),。不過,,游戲畢竟只是娛樂方式,即使掉幀也不影響生命安全,,而在自動駕駛算法里,,如果因?yàn)镕PS過低導(dǎo)致卡頓,誰知道那個遲遲未到的“下一幀畫面”里到底包括什么信息呢,?
對于算力的追求當(dāng)然永無止境,,但單純比拼算力已經(jīng)不是當(dāng)下自動駕駛芯片研發(fā)的唯一目標(biāo)了,,越來越多的廠商也都開始重視芯片多維度全方位的能力提升。用地平線余軼南博士的話說就是——算力大不如算得快,。
○三個經(jīng)典場景了解NOA真正實(shí)力
此次我們體驗(yàn)的車型為理想L8(參數(shù)|詢價) Pro,,有趣的是在智能駕駛方面理想官方也將之分為了兩個版本: AD Pro和AD Max,理想L8 Air和L8 Pro車型搭載的是AD Pro,,而L8 Max車型搭載的是AD Max,。

AD Max版本硬件則比AD Pro多了1顆128線激光雷達(dá),同時攝像頭的搭配也有所調(diào)整,,改為了6顆800萬像素?cái)z像頭和5顆200萬像素?cái)z像頭,。

對于芯片的不同選擇,理想方面認(rèn)為是為了滿足不同產(chǎn)品的不同需求,。由于AD Max車型后續(xù)會更新城市NOA功能,,而且在傳感器數(shù)量和配置上也有所區(qū)別,所以采用2顆Orin X的方案來作為應(yīng)對,。而AD Pro車型并不支持城市NOA,,也不具備激光雷達(dá)傳感器,所以使用1顆征程5完全能夠滿足當(dāng)前的需求,。
本次體驗(yàn)的路線是從中關(guān)村IC-Park出發(fā),,途徑G6京藏高速,在營城子橋進(jìn)匝道盤橋匯入里歷高速返回中關(guān)村IC-Park,,全程112公里,。這條路線會途徑人多車多的八達(dá)嶺路段,也會在回程時遇到大量長短不一的隧道,,是檢驗(yàn)高速NOA功能綜合能力的良好選擇,。

從交互界面看,NOA和L2級駕駛輔助整體區(qū)別不大,。兩條代表車道保持功能開啟的藍(lán)色車道線會向中間匯聚成一條藍(lán)色延長線,,指向車輛的行駛方向。這條線在即將自主變更車道時也會提前向目標(biāo)車道拐彎,,給車主一個直觀的提示,。
正常行駛狀態(tài)下我們很難感知到NOA和L2有什么本質(zhì)區(qū)別。這種平滑自然的過度其實(shí)也是理想汽車有意為之的結(jié)果,。大多數(shù)車主不需要也不關(guān)心他們在用的這套駕駛輔助功能到底是ACC+LKA還是NOA,,只要它安全、舒適,、高效就行了,。所以接下來我們通過“并線交互”、“出入匝道”以及“隧道場景”三個比較有代表性的場景跟大家分享一下我的實(shí)際體驗(yàn),。
首先是主動并線功能,。過去很多車型的主動并線需要駕駛員通過轉(zhuǎn)向燈來下達(dá)指令,,但在NOA領(lǐng)航輔助這種功能里其實(shí)并非必要。足夠強(qiáng)大的感知系統(tǒng)讓車輛本身可以實(shí)時了解周圍車輛的情況,,當(dāng)它發(fā)現(xiàn)前方車輛行駛速度較慢,,而鄰側(cè)車道通行效率較高的時候,會主動向鄰側(cè)車道進(jìn)行并線超車,。
當(dāng)遇到后方有車輛快速接近時,這套系統(tǒng)會保持等待狀態(tài),,直至后方空間足夠完成并線,。而等待時間過長時,它也會暫時取消并線請求,,繼續(xù)跟隨前車行駛,,過一段時間再考慮并線。
整個并線過程比較干凈利落,,車輛在進(jìn)入車道時也會根據(jù)前后車的實(shí)際情況調(diào)整車速,,而不是原封不動的平移過去。唯一比較遺憾的是,,理想對這個功能標(biāo)定的相當(dāng)保守,,其實(shí)很多明顯比較大的車流空隙駕駛員都可以切入,但理想L8還是會選擇等待后車通過,。

營城子橋附近是考驗(yàn)NOA的第二個難關(guān),。車輛需要先并入最右側(cè)車道,然后離開京新高速進(jìn)入匝道,,再經(jīng)過一個曲率非常大的盤橋路段之后,,離開匝道匯入京禮高速。
匝道合流場景是日常駕駛事故高發(fā)路段之一,,它具有動態(tài)性、隨機(jī)性與博弈性,。同時由于車道線較為復(fù)雜,,也是對車輛視覺感知的一個挑戰(zhàn)。

高速通過急彎會出現(xiàn)較為明顯的離心力,,提前降低時速會明顯降低離心力,,讓乘客體感更加舒適。
車道居中的表現(xiàn)也非常精準(zhǔn),,不過從實(shí)際駕駛者的角度出發(fā),大多數(shù)人行駛在匝道時車輛的位置并非在正中心,,而是稍向彎心偏移,。這也是為什么幾乎所有的匝道都給彎心方向留出了較大的空間作為冗余,。如果NOA能讓車輛更加貼近彎心一些,會更貼近實(shí)際人類駕駛習(xí)慣,,也會降低些許的緊張感,。
出彎后,車輛會在匯入車道開始一邊提速一邊進(jìn)入主路,。整個過程提速有力但不急促,,符合常規(guī)駕駛習(xí)慣。比較遺憾的是,,在整個匯入?yún)R出的過程中并沒有遇到其他車輛的動態(tài)交互,沒辦法探知NOA系統(tǒng)在面對匯入口加塞這種極端場景時會作何反應(yīng),有機(jī)會我們再找一臺車專門體驗(yàn)一下,。
隨后進(jìn)入返程路段,,車輛會經(jīng)過石峽隧道、佛巖寺隧道,、梯子峪隧道,、白羊城隧道等多條長短不一的隧道。隧道路段能考驗(yàn)車輛在面對明暗場景切換時視覺感知能力是否會受到影響,,同時也對依賴衛(wèi)星定位才能使用的高精度地圖是一個挑戰(zhàn),。
通過視頻可以清楚的看到,,理想L8在面對隧道內(nèi)和隧道外的較大光比情況下也沒有受到影響,。全程多條長短不一的隧道都可以穩(wěn)定的駛?cè)牒婉偝觯瑫r速沒有波動,,車輛的居中位置也沒有偏移,。

此時理想L8會主動放棄車道居中,稍微偏向無車一側(cè),,以緩解與大車相鄰時的緊張感,。而鄰側(cè)車道的大型車輛也會在HUD和車機(jī)屏幕中被標(biāo)記為橙色。直至完全超越大車后,,車輛重新回到車道中心繼續(xù)行駛,。從這一點(diǎn)能感覺到,理想的工程師確實(shí)認(rèn)真的考慮到日常駕駛時人類駕駛員的一些操作細(xì)節(jié),。
而在高精度地圖方面,,由于缺失了定位信息,車輛在進(jìn)入較長隧道前會通過語音提醒的方式告知駕駛者,,NOA功能即將退出,。隨后當(dāng)車輛進(jìn)入隧道時,NOA會自動降級為L2級駕駛輔助系統(tǒng)(ACC+LKA)。但對于較短的隧道,,則不會發(fā)生功能降級,,可以在駕駛員無感知的情況下通過短隧道。
從實(shí)際體感來看,,無論是ACC+LKA還是NOA,,面對隧道這種無法并線超車的簡單場景其實(shí)區(qū)別并不大。如果不提醒駕駛者NOA已退出,,反而能讓體驗(yàn)更無感一些,。或許這也是工程師思維的一種體現(xiàn),?一就是一,,二就是二。吃了一碗粉,,就給一碗粉的錢,。
○仍有余力?未來可期,?
短短2小時的體驗(yàn)讓我們對理想L8高速NOA有一個初印象,。除了在缺失高精度地圖信息和衛(wèi)星定位信息的地方降級為ACC+LKA之外,車輛全程自行完成行駛,,并沒有出現(xiàn)意外退出需要人工接管的情況,。穩(wěn)定,是我對這套系統(tǒng)的,。

而且,,余博士透露目前這套高速NOA仍然沒有把征程5的性能榨干到極限。雖然理想汽車表示不會給搭配AD PRO的車型提供城市NOA功能,,但我總有一種預(yù)感,,這顆芯片保留的那些實(shí)力,沒準(zhǔn)還能加入不少有用或者有趣的功能,。畢竟這么高的性能擺在這了,,不用也就浪費(fèi)了。沒準(zhǔn)等NOA功能經(jīng)過幾輪OTA之后,,我們再次把它開上路,,還能發(fā)現(xiàn)一些不一樣的新亮點(diǎn)。(圖/文 汽車之家 楊鵬)
