[汽車(chē)之家 新鮮技術(shù)解讀] 今年初,,比亞迪旗下高端品牌仰望,,發(fā)布了首批車(chē)型——仰望U8(參數(shù)|詢(xún)價(jià))和仰望U9,其中采用麥克納姆輪橫移出場(chǎng)的仰望U8,,既展現(xiàn)了易四方技術(shù)的過(guò)人之處,,也瞬間成了“網(wǎng)紅車(chē)”,而發(fā)布會(huì)上展現(xiàn)的原地調(diào)頭,、應(yīng)急浮水等功能,,更為易四方技術(shù)披上了強(qiáng)悍且神秘的外衣。這些功能是噱頭還是未來(lái)的產(chǎn)品亮點(diǎn),,“易四方”是如何實(shí)現(xiàn)這些功能的,?借著參加技術(shù)溝通會(huì)的契機(jī),我?guī)Т蠹乙煌矫亍耙姿姆健北澈蟮男C(jī),。
易四方=分布式電驅(qū)+融合感知
看過(guò)仰望U8發(fā)布會(huì),,眼尖的朋友不難發(fā)現(xiàn)其中奧秘,即四電機(jī)電驅(qū)配合橫向動(dòng)力矢量分配技術(shù),,不過(guò)這些只能算是“易四方”的冰山一角,。而多電機(jī)控制、場(chǎng)景化的功能設(shè)定加上整車(chē)智能化等多方需求,,也在推動(dòng)電子電氣架構(gòu)升級(jí),。




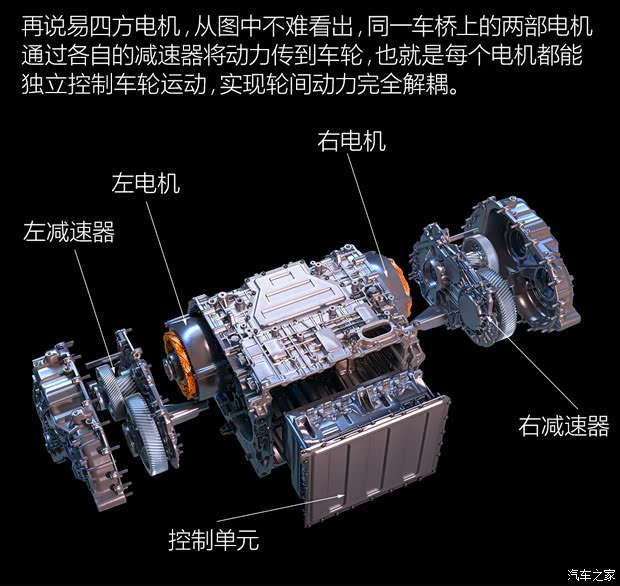
值得一提的是,易四方的單橋雙電機(jī)驅(qū)動(dòng)系統(tǒng)采用了高度集成化設(shè)計(jì),,從上圖能看到電機(jī)控制器放在了電機(jī)側(cè)面,,而非直接集成在電機(jī)頂部。另外,,四個(gè)電機(jī)均有獨(dú)立的控制器,,不過(guò)同驅(qū)動(dòng)橋上的兩個(gè)電機(jī)控制器采用了集成式設(shè)計(jì),結(jié)構(gòu)更緊湊,,提升了空間利用率,。
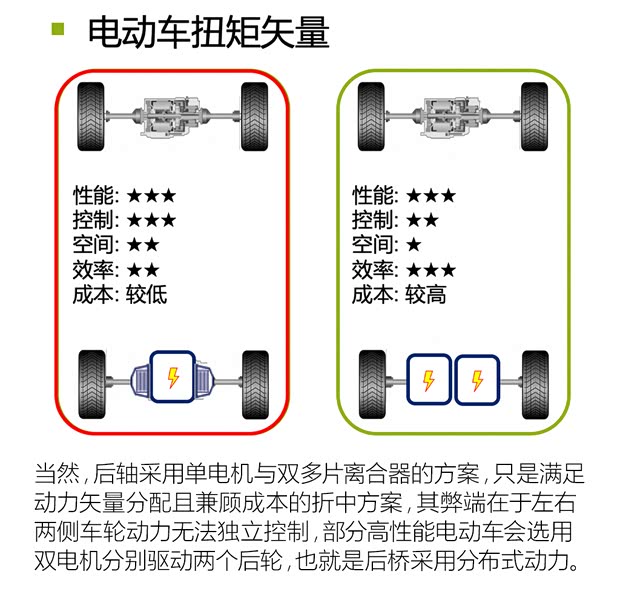
相比單電機(jī)+多片離合器的方案,以及三電機(jī)四驅(qū)策略,,通過(guò)四電機(jī)獨(dú)立控制四個(gè)車(chē)輪,,實(shí)現(xiàn)動(dòng)力前后、左右矢量分配易如反掌,,同時(shí)也具備左右兩側(cè)車(chē)輪反轉(zhuǎn)的能力,,聯(lián)想到了原地調(diào)頭功能?沒(méi)錯(cuò),,原地調(diào)頭需要分布式動(dòng)力系統(tǒng)實(shí)現(xiàn),,可如何控制才是關(guān)鍵,,這部分我后文會(huì)詳細(xì)說(shuō),咱先聊聊“易四方”的電子電氣架構(gòu),。


簡(jiǎn)單說(shuō),中央控制單元就像咱們的大腦,,“尷尬到用腳摳出三室一廳”就是大腦從環(huán)境感知到肢體動(dòng)作的整套流程,。對(duì)中央控制單元來(lái)說(shuō),掌握車(chē)輛與周?chē)h(huán)境信息是衍生出各種功能的前提,,不過(guò)遺憾的是,,官方暫未透露中央控制單元會(huì)選用哪款芯片。
另外,,官方稱(chēng)仰望品牌會(huì)標(biāo)配易四方技術(shù),,即該品牌旗下車(chē)型均會(huì)采用四電機(jī)四驅(qū),同時(shí)易四方技術(shù)平臺(tái)也能夠衍生出純電動(dòng)與混動(dòng)車(chē)型,,不過(guò)官方暫未透露混動(dòng)車(chē)型的技術(shù)路線(xiàn),。參考易四方技術(shù)平臺(tái)的結(jié)構(gòu),我們認(rèn)為發(fā)動(dòng)機(jī)與電動(dòng)機(jī)串聯(lián)且僅用于發(fā)電的增程式混動(dòng)系統(tǒng),,似乎更適合做“易四方”的搭檔,,各位怎么看呢,歡迎在評(píng)論區(qū)討論,。
炫技噱頭or錦囊妙計(jì),?
綜合上文來(lái)看,“易四方”是包含四電機(jī)電驅(qū)系統(tǒng),、電子電氣架構(gòu)和感知邏輯的“技術(shù)平臺(tái)”,,各項(xiàng)功能可以說(shuō)是這個(gè)平臺(tái)能力的延伸,其中也包含發(fā)布會(huì)上令人印象深刻的畫(huà)面,。
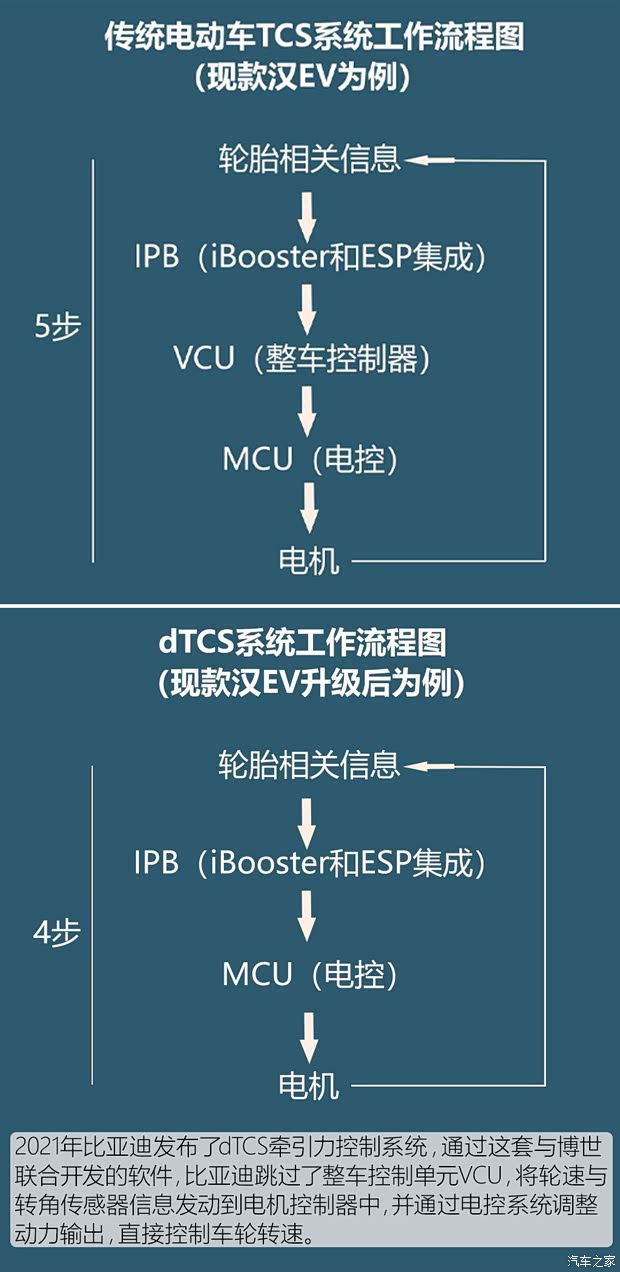

雖然dTCS能更加高效的完成車(chē)輛牽引力控制,,但其本身仍屬于ESP車(chē)身電子穩(wěn)定系統(tǒng)的組成部分,需要依靠減少動(dòng)力輸出保證車(chē)輛行駛穩(wěn)定性,。而電動(dòng)車(chē)時(shí)代,,部分車(chē)企開(kāi)始思考在車(chē)輪打滑前,通過(guò)調(diào)整前后電機(jī)輸出,,減少車(chē)輪空轉(zhuǎn)的幾率,。
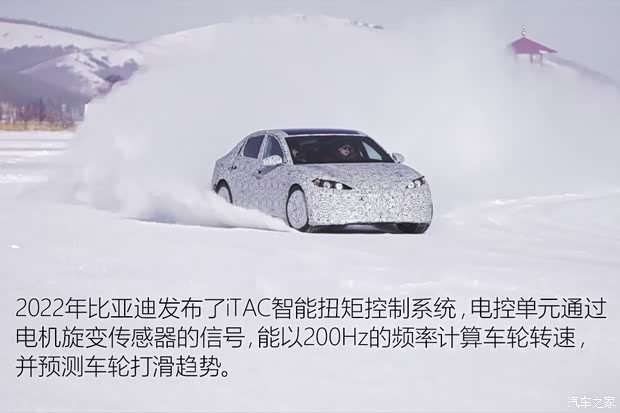

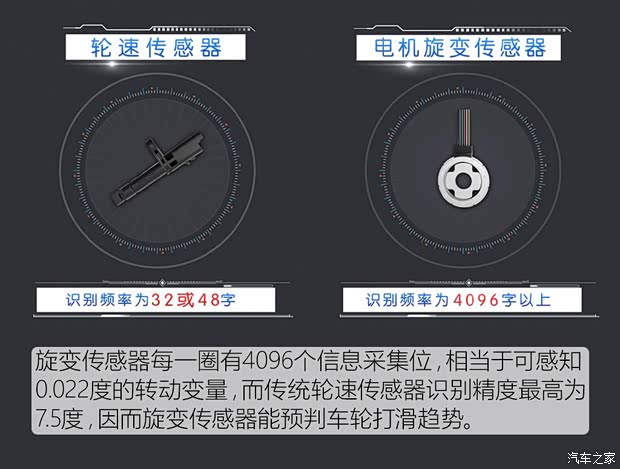
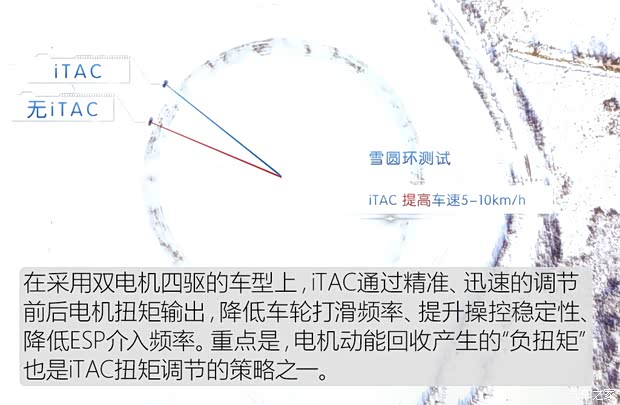
iTAC技術(shù)發(fā)布之初,比亞迪借雙電機(jī)四驅(qū)車(chē)型進(jìn)行了演示,,而仰望將旋變傳感器,、輪速傳感器等多重感知策略和iTAC的執(zhí)行邏輯,與四電機(jī)獨(dú)立驅(qū)動(dòng)結(jié)合到了一起,,提升濕滑路面行駛穩(wěn)定性約等于是“送分題”,。

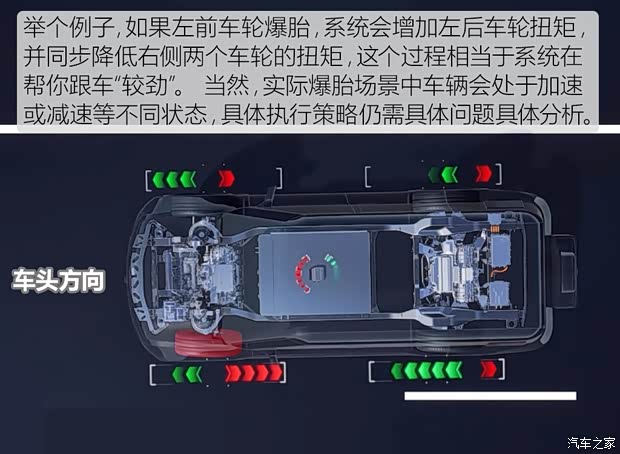
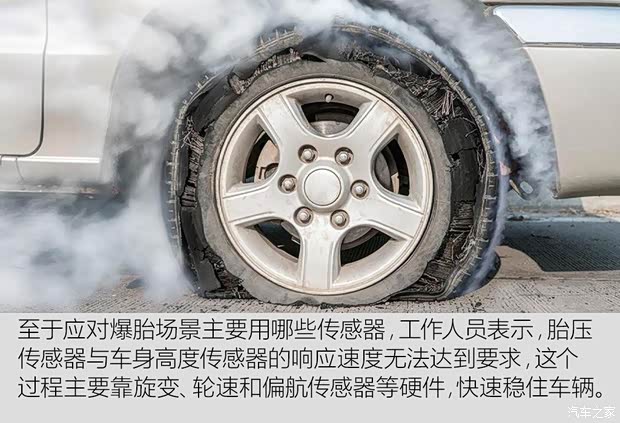
同時(shí)系統(tǒng)會(huì)計(jì)算出車(chē)輛爆胎后的操穩(wěn)極限,,并結(jié)合駕駛輔助系統(tǒng)傳感器對(duì)前方路況的感知,判斷出最佳行駛路線(xiàn),,在駕駛員急剎或大角度轉(zhuǎn)向時(shí)進(jìn)行干預(yù),,盡量避免由于駕駛員操作失誤導(dǎo)致車(chē)輛失控的情況,幫助駕駛員盡快駛?cè)氚踩耐\?chē)區(qū),。
