[汽車之家 技術(shù)] 2024年,,汽車智能化發(fā)展迅猛,從車企上看,,問界,、理想、小鵬,、小米在市場(chǎng)拓展和應(yīng)用場(chǎng)景方面取得了令人矚目的成績(jī),,從技術(shù)上看,純視覺和多傳感器融合路線“相愛相殺”,,端到端大模型,、BEV+Transformer 算法也開始大規(guī)模興起,智能駕駛的一切都比想象中來的更快也更兇猛,,這也讓我們對(duì)2025年的交通出行充滿想象,。

本篇文章,我將帶大家回顧2024年智能駕駛的大事件和核心技術(shù),,讓我們回顧過去,,展望未來,也希望這篇文章能成為您過年餐桌上的談資,,有任何問題或者想法也歡迎來評(píng)論區(qū)討論,。
一、智駕路線之爭(zhēng),,多傳感器融合和純視覺的再次交鋒
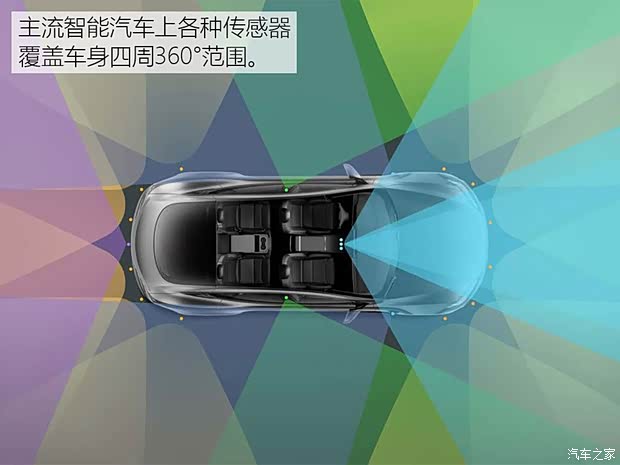
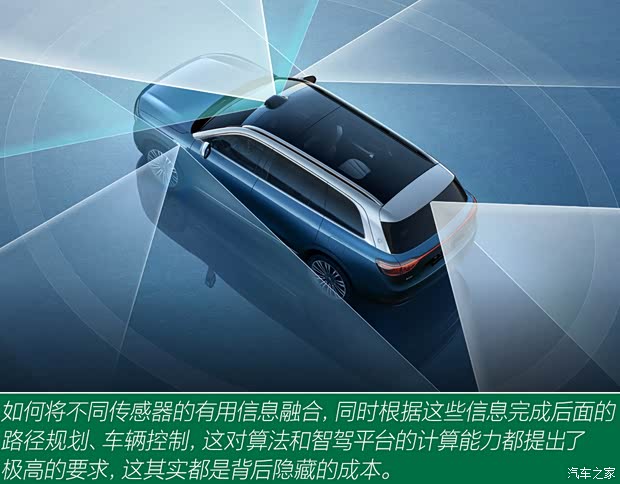
如果我們把一臺(tái)智能車看做機(jī)器人,,那它的動(dòng)作都是通過“感知”、“決策”、“執(zhí)行”這個(gè)邏輯來進(jìn)行設(shè)計(jì)的,,其中感知就是車輛的眼睛,。它可以籠統(tǒng)的理解為感知周圍的傳感器,通常來說包含攝像頭,、超聲波雷達(dá),、毫米波雷達(dá)、激光雷達(dá)這四種類型,,有些豪華品牌也會(huì)加入紅外成像設(shè)備,,這個(gè)相對(duì)少見暫且不提。

在智能駕駛最初的時(shí)候,,研究單位主要采用的是將這些傳感器的信息進(jìn)行融合,,以此實(shí)現(xiàn)相關(guān)的智駕功能,比如當(dāng)年的沃爾沃,、寶馬,,就是融合前視攝像頭和毫米波雷達(dá),通過不同傳感器的信息對(duì)周圍環(huán)境進(jìn)行判斷,,然后再去控制車輛,。
我們第一次發(fā)現(xiàn)側(cè)翼子板、B柱也能布置攝像頭,,IMU慣性測(cè)量單元竟然也會(huì)在車輛上安裝,,當(dāng)然實(shí)現(xiàn)的功能也更加豐富,在高速上車輛會(huì)自動(dòng)跟隨車流,,自動(dòng)變道等等,。
至此,多傳感器融合和純視覺感知兩大技術(shù)路線正式形成,。從有缺點(diǎn)上看,,兩者其實(shí)都有自己的長(zhǎng)處和短處。

因?yàn)楹诵膫鞲衅饕詳z像頭為主,,它的硬件成本確實(shí)是低的。因此也能將智駕功能應(yīng)用到更低成本的車型上,,讓更多消費(fèi)者去體驗(yàn)智駕功能,,以此來提升車型競(jìng)爭(zhēng)力。第二個(gè)是目前純視覺對(duì)異性障礙物的識(shí)別能力有了巨大提升,,尤其在去年BEV+Occupancy Network技術(shù)的普及,,提升了純視覺感知的魯棒性。
視覺方案有一個(gè)很大的問題,,那就是如何規(guī)避道路上異型障礙物,。雖然視覺有著更加豐富的環(huán)境信息,同時(shí)分辨率也是激光點(diǎn)云所無法比擬的,但是它不具備深度信息,,且系統(tǒng)需要「認(rèn)識(shí)」道路上無窮無盡的異形障礙物,。因此就需要不斷的去標(biāo)注然后對(duì)系統(tǒng)進(jìn)行訓(xùn)練,但是道路上一定會(huì)出現(xiàn)新的,、沒見過的障礙物,,車子就有可能不識(shí)別,而發(fā)生危險(xiǎn),。Occupancy Network(占用網(wǎng)絡(luò))的出現(xiàn),,成了一種新的解題方法。
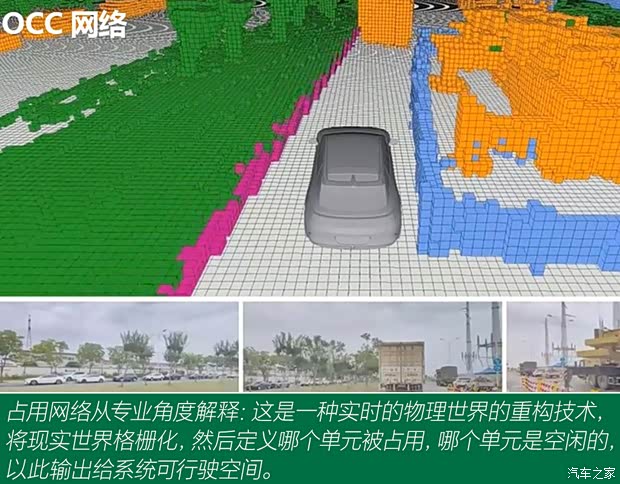
所以說Occupancy Network技術(shù)可以更好地解決通用障礙物難以處理的問題,,讓純視覺路線突破瓶頸,。
以上就是純視覺的一些主要優(yōu)勢(shì),那它的缺點(diǎn)是什么呢,?
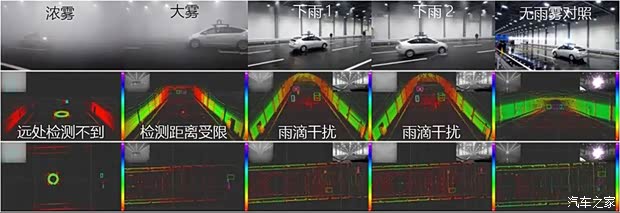
1,、從咱們剛才的試驗(yàn)也能看出來,惡劣環(huán)境,,對(duì)攝像頭影響不小,,其實(shí)就跟我們?nèi)搜垡粯樱诎淡h(huán)境啊或者有大光比的明暗環(huán)境變化時(shí),,我們?nèi)搜垡彩懿涣?,?duì)于攝像頭來說也同樣如此。
2,、前面提到的占用網(wǎng)絡(luò)其實(shí)目前還不算成熟,,有時(shí)候還是無法處理道路上的異形障礙物,這個(gè)還是需要時(shí)間的積累,。
3,、第三點(diǎn)就在于純視覺對(duì)算法要求很高,這是一個(gè)鏈條,,算法要求高,,執(zhí)行算法的算力也要有高要求,也就是芯片要很好,,同時(shí)想要一個(gè)好的算法就需要好的數(shù)據(jù)去不斷的訓(xùn)練,,所以你的數(shù)據(jù)量也要高,這都是隱形成本,,這些在下面我還會(huì)更詳細(xì)的跟大家聊一下,。
反過來看多傳感器融合路線:
首先說說優(yōu)點(diǎn):
1、應(yīng)對(duì)惡劣環(huán)境的能力更強(qiáng),,因?yàn)橛卸鄠€(gè)傳感器,,一般還配有激光雷達(dá),,所以在應(yīng)對(duì)復(fù)雜環(huán)境時(shí)安全冗余高。
2,、感知準(zhǔn)確度高,,激光雷達(dá)能厘米級(jí)感知低矮物體,同時(shí)在追蹤近距離物體上,,尤其是擁堵下的慢速加塞,,表現(xiàn)的會(huì)更好。
3,、一般搭載激光雷達(dá)的智駕系統(tǒng),,都采用了多傳感器融合的方式,也就是激光雷達(dá)也不是唯一的傳感器,,一般都是配合著視覺感知,、毫米波雷達(dá)甚至還有超聲波雷達(dá),一起去對(duì)周圍環(huán)境進(jìn)行感知,,就相當(dāng)于你開車時(shí)既能看到道路的情況,,又能聽到道路上的聲音,它的冗余更大,,魯棒性更高,,在理論上講,這種融合性感知是更安全,、全面的,。
當(dāng)然,激光雷達(dá)的缺點(diǎn)也挺明顯的,,
目前來看主要有兩方面,,一個(gè)是成本,一個(gè)是算法,。
成本就不用多說了,,價(jià)格高肯定會(huì)限制車企的搭載,如果激光雷達(dá)真的和毫米波雷達(dá)一個(gè)價(jià)位,,想必隨便做個(gè)智駕都會(huì)加上激光雷達(dá),;第二個(gè)問題在算法,這個(gè)有點(diǎn)類似雙刃劍,。優(yōu)點(diǎn)里面我們提到過,,搭載激光雷達(dá)的智駕系統(tǒng)都屬于多傳感器融合。
率先在美國(guó)獲得 L3 級(jí)智能駕駛運(yùn)營(yíng)許可的梅賽德斯-奔馳表示:奔馳的DRIVE PILOT搭載包含激光雷達(dá)在內(nèi)的多個(gè)傳感器,,足夠的安全冗余對(duì)實(shí)現(xiàn)安全可靠的L3級(jí)別智能駕駛是必不可少的。
本質(zhì)上,,是激光雷達(dá)具有抗干擾,、三維、高置信度的優(yōu)勢(shì),能為算法預(yù)測(cè)和規(guī)控提供高質(zhì)量的感知輸入,。
所以,,我們有理由相信激光雷達(dá)既是智能汽車的“隱形安全氣囊”,更是加速算法開發(fā)落地的「秘密武器」,。
而對(duì)于純視覺感知來說,,背后隱含的是數(shù)據(jù)驅(qū)動(dòng)的邏輯。與這套方案相匹配的是特斯拉通過數(shù)百萬輛車源源不斷采集的數(shù)據(jù),,官方統(tǒng)計(jì),,Autopilot累計(jì)行駛里程超90億英里,F(xiàn)SD beta累計(jì)行駛里程超5億英里,。而為了處理這些海量數(shù)據(jù),,特斯拉儲(chǔ)備了14000塊總價(jià)值數(shù)十億的AI芯片,可同時(shí)處理 1600億幀圖像,。

“算法+算力+數(shù)據(jù)”,,構(gòu)成了后來者難以追趕的競(jìng)爭(zhēng)壁壘。從全局看,,不光要關(guān)注看得見的顯性成本,,更要關(guān)注看不見的隱性成本。拿掉激光雷達(dá)看似節(jié)省了一些硬件成本,,但車端感知能力的下降,,需要在云端投入更多的資源進(jìn)行開發(fā),極大抬高了隱性成本,,在車輛銷量沒有非常高的情況下,,這些隱性成本均攤下來實(shí)際上遠(yuǎn)高于硬件成本。
純視覺與傳感器融合的路線之爭(zhēng),,本質(zhì)是"仿生派"與"工程派"對(duì)智能駕駛終局的不同想象,。在算力狂飆的今天,兩種路線正在逼近同一個(gè)目標(biāo):用更優(yōu)雅的方式解決"機(jī)器如何理解世界"這個(gè)問題,。這場(chǎng)對(duì)決并沒有分出勝負(fù),,唯有繼續(xù)的比拼、進(jìn)化才能看到終章,。
二,、端到端提了一年,但究竟是個(gè)啥東西,?
2024年在智駕技術(shù)方面第二個(gè)熱點(diǎn)技術(shù)就是端到端,,相信網(wǎng)友們或多或少也聽到過這個(gè)名詞。但端到端到底是個(gè)啥呢,?下面我們就用簡(jiǎn)單點(diǎn)的語言來跟大家聊一聊,。
我們以學(xué)車為例,,學(xué)車的過程是先學(xué)交規(guī)、駕駛的理論知識(shí),,接著教練會(huì)手把手教你一遍,,自己練一遍,教一遍,,練一遍,,慢慢我們就會(huì)掌握基本的駕駛技巧。以前的智駕系統(tǒng)基本也是遵循這個(gè)道理,,工程師們需要教它認(rèn)路,、認(rèn)車、認(rèn)人,,再教它怎么打方向盤,、踩油門,最后才能上路,。這種方法步驟繁多,,特別復(fù)雜,而且容易出錯(cuò),。
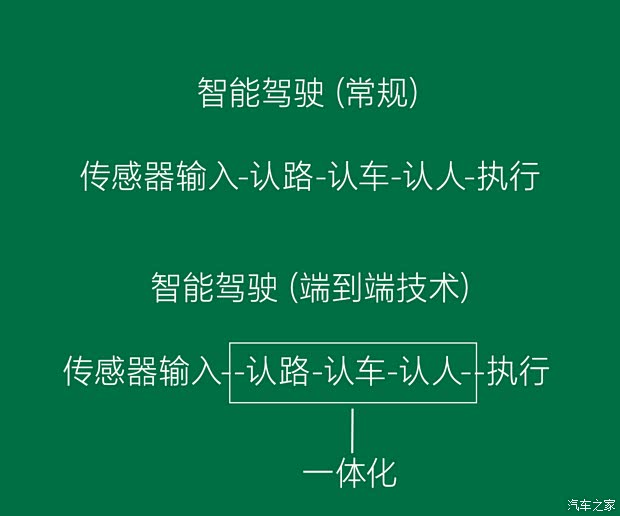
端到端就是省略了認(rèn)路,、認(rèn)車、認(rèn)人,,再教它怎么打方向盤,、踩油門的步驟,直接給機(jī)器放老司機(jī)開車的視頻,,讓機(jī)器直接“看”人類司機(jī)開車,,從起點(diǎn)到終點(diǎn),它自己琢磨該怎么開,。

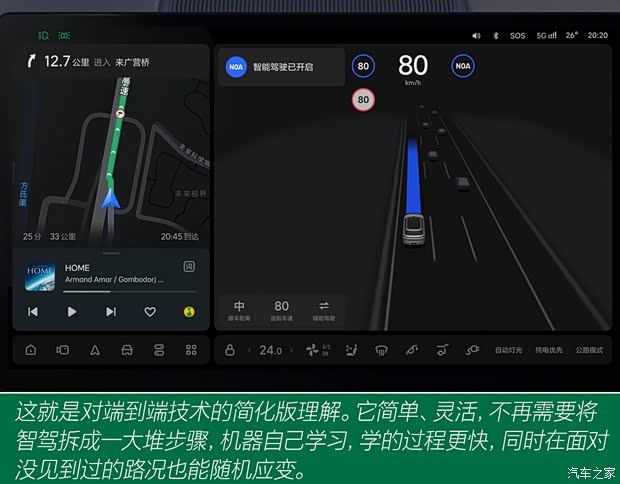
從智駕體驗(yàn)上講,,應(yīng)用端到端技術(shù)的智駕開起來也更自然,坐車的人也更像老司機(jī)駕駛體驗(yàn),。當(dāng)然,,目前的端到端依然是個(gè)新手,不僅僅是“上車”的時(shí)間短,,其學(xué)習(xí)老司機(jī)的時(shí)間也很短,,還需要大量的練習(xí)和經(jīng)驗(yàn)才能開的更好。但毫無疑問,,它是提高當(dāng)前智能駕駛能力的一條有效路線,,它讓機(jī)器可以更像人類駕駛,提升我們智駕時(shí)的安全,、便捷性,。
三,、智駕企業(yè)的上市大年
聊完具體的技術(shù),接下來讓我們?cè)侔涯抗廪D(zhuǎn)向行業(yè),。2024年對(duì)整個(gè)智駕行業(yè)來說也是不同尋常的一年,大量的企業(yè)開始涌入市場(chǎng),,速騰聚創(chuàng),、地平線、黑芝麻智能,、文遠(yuǎn)知行,、小馬智行等企業(yè)受到了大量資本青睞,這也為行業(yè)發(fā)展注入了活力,,上市-融資盤活了企業(yè),,也進(jìn)一步促進(jìn)了智駕的發(fā)展,不斷換代的產(chǎn)品也降低了成本,,極大提升了車企對(duì)智駕的興趣度,。

當(dāng)然也引出了下個(gè)話題,平價(jià)智能車開始逐漸普及,。
從價(jià)位上看,,2024年裝配有主流L2功能的智能車已經(jīng)下探到20萬以下,其中以小鵬汽車為核心代表,,小鵬P7i甚至全系配置了高階智駕,,部分20萬以下車型甚至搭載了城市及高速NOA,智駕平權(quán)運(yùn)動(dòng)已然在車企競(jìng)爭(zhēng)中悄然興起,。而傳統(tǒng)汽車廠商也不再低調(diào),,比亞迪“天神之言”、奇瑞大卓智駕都開始在20萬以下車型開始布置,。

寫在最后:智能駕駛技術(shù)的發(fā)展,,近年來已經(jīng)步入了一個(gè)全新的階段。隨著人工智能,、5G通信,、傳感器技術(shù)的進(jìn)步,越來越多的車企和科技公司在這一領(lǐng)域取得了突破性進(jìn)展,。2024年,,智能駕駛技術(shù)在各個(gè)層面都有了顯著的進(jìn)步,涵蓋了自動(dòng)駕駛的硬件,、軟件,、法規(guī)以及倫理等多方面的內(nèi)容。未來幾年內(nèi),,我們將迎來一個(gè)更加智能,、安全和高效的出行時(shí)代,。盡管挑戰(zhàn)依然存在,但可以肯定的是,,智能駕駛將繼續(xù)以令人驚嘆的速度改變我們的出行方式,、交通格局乃至整個(gè)社會(huì)結(jié)構(gòu)。(圖/文 汽車之家 冷曉陽)
