[汽車之家 新聞] 2014年7月3日在德國馬格德堡,梅賽德斯-奔馳未來卡車2025的一項(xiàng)全新運(yùn)輸技術(shù)進(jìn)行了全球首發(fā),,該技術(shù)可實(shí)現(xiàn)卡車的自主駕駛和“高速公路領(lǐng)航”功能,,其改善了駕駛員在高速公路上枯燥的工作狀態(tài),,提高運(yùn)輸效率及道路交通的安全性。

此項(xiàng)技術(shù)主要基于梅賽德斯-奔馳2014款A(yù)ctros 1845卡車上進(jìn)行實(shí)驗(yàn),。梅賽德斯-奔馳Actros 1845的發(fā)動(dòng)機(jī)最高輸出功率為449馬力,,最大扭矩為2200?!っ?,同時(shí)標(biāo)配12速奔馳Powershift 2自動(dòng)變速器,。其后部搭配了一款基于空氣動(dòng)力學(xué)設(shè)計(jì)的Actros“航空掛車”,它在提高燃油經(jīng)濟(jì)性方面有著良好的表現(xiàn),,可節(jié)省5%的油耗,。與梅賽德斯-奔馳未來卡車2025搭配成完美組合,。

該技術(shù)是基于車道保持輔助系統(tǒng),、車距控制系統(tǒng),、ABA緊急制動(dòng)系統(tǒng)、Stop-and-Go Assist堵車自動(dòng)起動(dòng)和停止系統(tǒng),、預(yù)測巡航控制系統(tǒng),,即現(xiàn)在所謂的動(dòng)力總成預(yù)控制系統(tǒng)(PPC)為基礎(chǔ),,配合車輛周圍的雷達(dá)傳感器及全景多功能攝像頭來實(shí)現(xiàn)的,。

梅賽德斯-奔馳未來卡車2025配備的立體攝像頭可識別單雙車道,、人行道,、移動(dòng)和靜止的物體以及監(jiān)視范圍內(nèi)的所有物體,,同時(shí)路面情況也在監(jiān)測范圍之內(nèi),。該立體攝像頭可辨識所有與背景影像形成對比的物體,從而能夠精確地測量出間距,。此外,,前置立體攝像頭還能夠捕捉交通標(biāo)志的信息,。除物體和距離識別外,,立體攝像頭的另外一個(gè)重要功能是識別車道標(biāo)記,,引導(dǎo)自主車道駕駛。

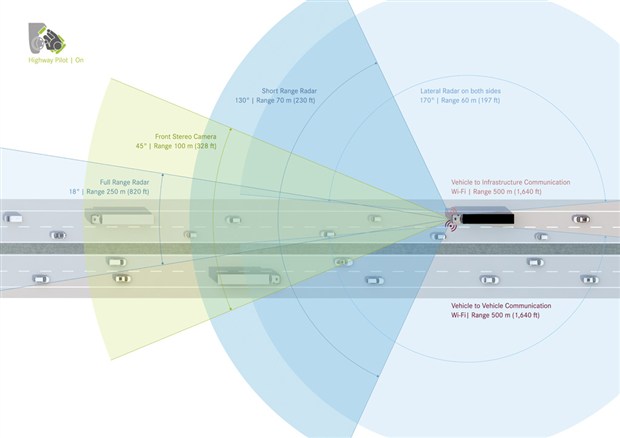
前置雷達(dá)傳感器的掃描距離為250米,掃描范圍為18度,。近距離傳感器的掃描距離為70米,掃描范圍為130度,。位于擋風(fēng)玻璃后車內(nèi)儀表盤上方的立體攝像頭也可以掃描車輛前方的路面,。立體攝像頭的掃描距離為100米,,水平掃描范圍為45度,,垂直掃描范圍為27度,。該系統(tǒng)中還配有一個(gè)應(yīng)用于動(dòng)力總成預(yù)控制系統(tǒng)(PPC)中的三維數(shù)字地圖,,使得車輛可實(shí)時(shí),、全面掌握道路的軌跡和周邊地形。
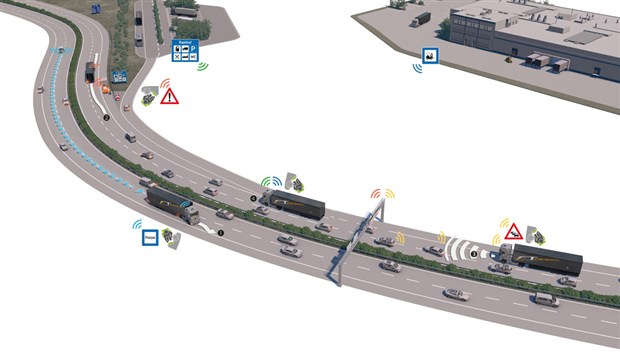
“高速公路領(lǐng)航”系統(tǒng)與V2V(車與車)和V2I(車與交通設(shè)施)網(wǎng)絡(luò)的互通,。在不遠(yuǎn)的將來,,每輛配備該系統(tǒng)的車輛都可以向周邊持續(xù)發(fā)送CAM(Corporate Awareness Message)信息,以告知車輛的存在,。信息內(nèi)容包括車輛位置,、車型,、尺寸,、行駛方向及速度、以及任何有關(guān)加速和制動(dòng)的操作信息,。信息發(fā)送的頻次取決于車速和運(yùn)動(dòng)變化的強(qiáng)度,,最低為1次/秒;當(dāng)運(yùn)動(dòng)變化明顯時(shí),,信息發(fā)送的頻率可達(dá)10次/秒,。


自主駕駛功能激活后,,駕駛員就可以將駕駛座向副駕駛轉(zhuǎn)動(dòng)45度,調(diào)整為工作或休息狀態(tài),,其還可以使用帶觸摸屏的可移動(dòng)平板電腦開展其它活動(dòng),例如與外界通信或完成以往由調(diào)度員完成的任務(wù),但駕駛員不能睡覺,。因?yàn)槲磥砜ㄜ?025的掌控者仍然是駕駛員,,車輛必須始終允許駕駛員恢復(fù)手動(dòng)控制,。

自主超車功能不在該項(xiàng)技術(shù)的設(shè)想范圍之內(nèi),此動(dòng)作必須由駕駛員親自執(zhí)行,,離開高速公路或在岔路口變換車道時(shí)也是如此,。關(guān)閉自動(dòng)駕駛功能時(shí),系統(tǒng)會(huì)先給駕駛員一個(gè)視覺通知,,然后發(fā)出語音提示恢復(fù)手動(dòng)控制。
總結(jié):
該項(xiàng)輔助系統(tǒng)目前最大的創(chuàng)舉是動(dòng)力總成預(yù)控制系統(tǒng)(PPC)。該技術(shù)將路線的三維GPS數(shù)據(jù)與當(dāng)前的車輛數(shù)據(jù)和動(dòng)力總成相結(jié)合,根據(jù)地形預(yù)測性地調(diào)節(jié)擋位,,降低了5%的燃油消耗,還緩解了卡車駕駛員在高速公路上的枯燥工作,。(文/汽車之家 柳偉)
更多閱讀:
采用容錯(cuò)架構(gòu) 谷歌發(fā)布無人駕駛原型車
http://zphnet8.com/news/201405/805208.html
