[汽車之家 行業(yè)動態(tài)] 7月8日,,中國汽車技術(shù)研究中心有限公司,、清華大學(xué),、華為技術(shù)有限公司三方聯(lián)合編寫的《汽車智能駕駛技術(shù)及產(chǎn)業(yè)發(fā)展白皮書》正式發(fā)布。此書從“產(chǎn)學(xué)研”角度聯(lián)合研判汽車智能駕駛產(chǎn)業(yè)發(fā)展趨勢,明晰智能駕駛發(fā)展過程中相關(guān)易錯、易混的概念,,分析智能駕駛相關(guān)技術(shù)原理與發(fā)展水平,研究智能駕駛安全體系建設(shè)要求,,明確智能駕駛技術(shù)產(chǎn)業(yè)政策法規(guī)與合規(guī)要求,,闡述以智能駕駛技術(shù)為核心的整車智能化路線演變方向。

此書包含“智能駕駛概念與發(fā)展辨析”,、“智能駕駛技術(shù)架構(gòu)與關(guān)鍵能力”,、“智能駕駛行業(yè)賦能與場景創(chuàng)新”、“自動駕駛安全體系”,、“智能駕駛產(chǎn)業(yè)環(huán)境與生態(tài)構(gòu)建”,、“未來展望”幾大篇章。
智能駕駛的概念分類
基于工信部牽頭制定的GB/T 40429—2021《汽車駕駛自動化分級》,,再次明確駕駛自動化0-5級的分類,,并且對于當(dāng)前的技術(shù)階段再次對于2級和3級駕駛自動化進(jìn)行明確。2級與3級駕駛自動化的核心差異點在于責(zé)任主體,、系統(tǒng)能力和駕駛員狀態(tài)監(jiān)測三個方面,,2級車輛能夠同時自動進(jìn)行持續(xù)的橫向和縱向控制,即車輛具備自動加速,、減速以及轉(zhuǎn)向等功能,,但駕駛員仍需時刻保持注意力,對車輛進(jìn)行監(jiān)督,,并在必要時干預(yù)車輛,,責(zé)任主體為駕駛員;3級駕駛自動化的核心特征是在特定設(shè)計運行條件(ODD)下,,系統(tǒng)可執(zhí)行全部動態(tài)駕駛?cè)蝿?wù)(如高速公路,、城市道路等),允許駕駛員在系統(tǒng)運行期間不再持續(xù)監(jiān)管道路環(huán)境,可進(jìn)行有限度的非駕駛活動,,但需在系統(tǒng)請求時進(jìn)行接管,,如果3級系統(tǒng)激活期間發(fā)生問題,經(jīng)相關(guān)部門認(rèn)定后,,應(yīng)由責(zé)任方承擔(dān)責(zé)任,。

截至到本白皮書發(fā)布日期,市場上汽車產(chǎn)品均處于2級駕駛自動化及以下階段,,沒有達(dá)到3級駕駛自動化程度,。根據(jù)現(xiàn)行交通法規(guī)及技術(shù)標(biāo)準(zhǔn),2級駕駛自動化階段運行必須處于人類駕駛員的持續(xù)監(jiān)管之下,,操作主體是駕駛員,,若發(fā)生交通事故,駕駛員須承擔(dān)法定責(zé)任,。盡管標(biāo)準(zhǔn)中已經(jīng)對駕駛自動化等級做了詳細(xì)的定義,、解釋以及邊界范圍的限定,但在汽車市場的宣傳與傳播中,,仍存在對上述概念混淆使用的亂象,,有必要理清相關(guān)概念。
此外,,也強(qiáng)調(diào)了智能駕駛的邏輯架構(gòu)的概念和數(shù)據(jù)是智能駕駛發(fā)展的核心的發(fā)展路徑,。
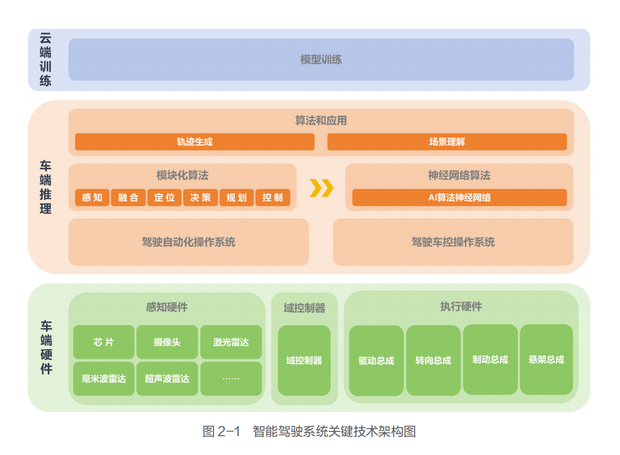
智能駕駛技術(shù)架構(gòu)與關(guān)鍵能力
一、車端硬件
感知硬件
在白皮書第二章中提到:汽車智能駕駛行業(yè)中存在技術(shù)過度化營銷的現(xiàn)象,,其核心癥結(jié)在于技術(shù)參數(shù)的片面?zhèn)鞑ヅc系統(tǒng)價值的認(rèn)知錯位,。一是算力參數(shù)的孤立化傳播。智能駕駛系統(tǒng)的成熟度更取決于算法迭代能力,、數(shù)據(jù)閉環(huán)體系,、功能安全設(shè)計等深層技術(shù)要素的有機(jī)融合,算力硬件作為基礎(chǔ)支撐平臺固然重要,,但必須與場景理解算法,、海量數(shù)據(jù)訓(xùn)練驗證、多層級安全冗余等系統(tǒng)化工程能力形成協(xié)同,,才能真正實現(xiàn)安全可靠的駕駛體驗,。二是市場認(rèn)知呈現(xiàn)斷層式割裂。普通消費者受限于技術(shù)背景,,難以分辨算力數(shù)值與實際場景處理能力的差異,,易被營銷話術(shù)引導(dǎo),導(dǎo)致選購決策與真實需求錯配,。這些現(xiàn)象不僅導(dǎo)致關(guān)鍵參數(shù)的市場認(rèn)知混亂,,更引發(fā)了無序競爭等市場失范問題,,亟需行業(yè)合力攜手構(gòu)建技術(shù)科普體系,明確算力指標(biāo)與實際性能的映射關(guān)系,,解析智能駕駛系統(tǒng)技術(shù)邏輯,,幫助用戶建立包含硬件性能、算法成熟度與數(shù)據(jù)服務(wù)能力的認(rèn)知框架,,推動智能駕駛行業(yè)從“參數(shù)競爭”轉(zhuǎn)向“價值競爭”轉(zhuǎn)變。下表為主流傳感器的行業(yè)水平參考信息:
1,、攝像頭關(guān)鍵參數(shù)及行業(yè)水平
|
參數(shù)分類 |
行業(yè)優(yōu)秀水平 |
參數(shù)說明 |
|
像素( px ) |
前視≥ 8 millions,、側(cè)視≥ 2 millions 環(huán)視≥ 2 millions、后視≥ 2 millions |
圖像像素越大分辨率越高,,但分辨率過大對目標(biāo)識 別提升有限且算力消耗大 |
|
幀率(fps) |
前視≥ 30,、側(cè)視≥ 30 環(huán)視≥ 20、后視≥ 20 |
攝像頭每秒能記錄或顯示的圖像數(shù)量,,越大畫面實 時性越高,、提供的信息越精細(xì),但幀率過大對目標(biāo) 識別提升有限且算力消耗大 |
2,、激光雷達(dá)關(guān)鍵參數(shù)及行業(yè)水平
|
參數(shù)分類 |
行業(yè)優(yōu)秀水平 |
參數(shù)說明 |
|
探測距離 |
≥ 200 m@10% 反射率 |
理論可以測量物體的最大距離,,距離越遠(yuǎn)越好 |
|
線數(shù) |
≥ 128 |
分辨率,線數(shù)越高越好 |
|
角分辨率 |
水平≤ 0.1°,、垂直≤ 0.1° |
目標(biāo)辨別能力,,分辨率越小越好 |
|
幀率 |
≥ 10Hz |
每兩幀的時間間隔,幀率越大越好 |
3,、毫米波雷達(dá)
|
參數(shù)分類 |
行業(yè)優(yōu)秀水平 |
參數(shù)說明 |
|
探測距離 |
前向長距離雷達(dá):≥ 280 m 角雷達(dá):≥ 150 |
理論可以測量物體的最大距離,,距離越遠(yuǎn)越好 |
|
水平角分辨率 |
≤ 3° |
目標(biāo)辨別能力,分辨率越小越好 |
|
垂直角分辨率 |
≤ 15° |
僅4D毫米波雷達(dá)具備俯仰角測量能力 |
|
視場角 |
前向長距離雷達(dá):水平 FOV ≥ 120°,、垂直 |
探測覆蓋范圍,,視場角越大越好 |
|
速度測量精度 |
≤ 0.1 m/s(勻速目標(biāo)),≤ 0.5 m/s(急加速目標(biāo)) |
目標(biāo)測速能力,,精度越小越好 |
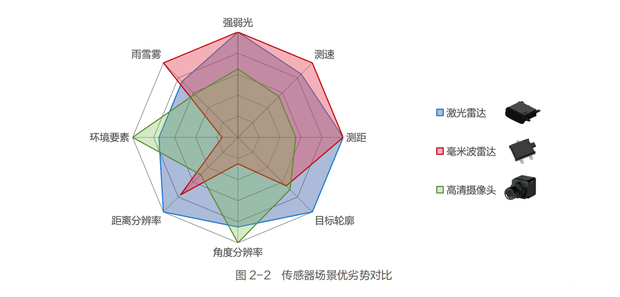
根據(jù)參與感知部件的不同,,感知技術(shù)方案主要分為三類:
一是純視覺方案。純視覺方案依賴攝像頭作為核心感知硬件,,通過圖像處理,、深度學(xué)習(xí)算法實現(xiàn)環(huán)境感知,并不依賴?yán)走_(dá),、激光雷達(dá)等其他主動式傳感器,。純視覺方案對于交通要素識別能力好,但是受光照,、極端天氣影響較大,,適合環(huán)境相對簡單的駕駛場景,,純視覺方案類似于人眼觀察能力,可以達(dá)到類人駕駛水平,。
二是主視覺方案,。主視覺方案以攝像頭為核心感知單元,輔以少量超聲波雷達(dá),、短距毫米波雷達(dá)等傳感器,,形成“視覺為主,其他傳感器為輔”的輕量融合方案,。主視覺方案的核心決策仍依賴視覺數(shù)據(jù),,輔助傳感器僅用于補(bǔ)充特定場景,如近距離盲區(qū),、低速泊車等典型場景,,更加適應(yīng)城區(qū)等復(fù)雜路況,是在純視覺方案基礎(chǔ)上的補(bǔ)盲,,未來可以達(dá)到老司機(jī)駕駛水平,。
三是多傳感器融合方案。多傳感器融合方案整合多種異構(gòu)傳感器,,如攝像頭毫米波雷達(dá),、超聲波雷達(dá)、激光雷達(dá)等傳感器實現(xiàn)環(huán)境感知,,各傳感器優(yōu)勢互補(bǔ),,對于環(huán)境、天氣適應(yīng)性更強(qiáng),,擁有更高的安全性能,,未來可以實現(xiàn)超人的駕駛水平。
域控制器
域控制器是智能駕駛系統(tǒng)的傳感器接入與車端推理算法運行的硬件平臺,,是智能駕駛系統(tǒng)運行的核心部件,,運行智能駕駛系統(tǒng)推理算法,需要強(qiáng)大的NPU與CPU算力,,業(yè)界一般是集成為一顆SoC中,,計算SoC的算力大小對智能駕駛推理算法的部署與運行效果至關(guān)重要。當(dāng)前2級智能駕駛主流場景下,,現(xiàn)有50~200TOPS稠密算力水平已經(jīng)可以滿足實際運行需求,,過度堆砌算力反而會造成資源浪費與成本增加。以人工智能領(lǐng)域為例,,ChatGPT-O1憑借1.7萬億參數(shù)構(gòu)建龐大模型體系,,卻被 DeepSeek-R1以更高效的算法架構(gòu)與算力利用方式實現(xiàn)超越,計算資源需求僅為Chat GPT的1%左右,。這一案例充分證明,,算力規(guī)模并非決定技術(shù)表現(xiàn)的唯一要素,,算法優(yōu)化與算力利用效率提升同樣關(guān)鍵。
|
等級 |
車端算力要求 |
可以滿足的功能 |
|
2 級 |
≥ 50 TOPS(稠密) |
ACC,、LCC,、APA、AVP,、RPA,、高速領(lǐng)航輔助駕駛、城區(qū) 領(lǐng)航輔助駕駛 |
|
3 級 |
≥ 200 TOPS(稠密) |
ACC,、LCC,、APA、AVP,、RPA、TJP,、高速有條件自動駕 駛,、城區(qū)有條件自動駕駛,雙冗余 & 高可靠 |
|
4 級 |
≥ 1000 TOPS(稠密) |
ACC,、LCC,、APA、AVP,、RPA,、TJP、高速自動駕駛,、城 區(qū)自動駕駛,,園區(qū)自動駕駛、全冗余 & 高可靠 |
|
5 級 |
≥ 2000 TOPS(稠密) |
任意點到任意點,,全冗余 & 高可靠 |
回歸智能駕駛領(lǐng)域,,2級智能駕駛對算力的需求約為≥ 50TOPS稠密算力,3 級則提升至≥ 200TOPS稠密算力,,4級提升至≥ 1000TOPS 稠密算力,,5級可能將提升至≥ 2000TOPS稠密算力的水平。目前,,多數(shù)企業(yè)已達(dá)成對應(yīng)算力能力,,盲目追求算力峰值既無必要,也不符合成本效益原則,,行業(yè)發(fā)展的重點應(yīng)轉(zhuǎn)向算力資源的精細(xì)化管理與優(yōu)化配置,,通過算法迭代、軟硬件協(xié)同設(shè)計等手段,,實現(xiàn)功能體驗升級與成本控制的動態(tài)平衡,,推動智能駕駛技術(shù)向更高效,、可持續(xù)的方向發(fā)展。對于車端推理算力而言,,行業(yè)需明確稠密算力與稀疏算力的宣傳口徑,。從數(shù)據(jù)結(jié)構(gòu)特性與計算模式維度的不同,可分為稠密算力與稀疏算力,,二者有著本質(zhì)區(qū)別,,不可混淆或簡單等同。
執(zhí)行硬件
執(zhí)行硬件包含驅(qū)動總成,、轉(zhuǎn)向總成,、制動總成、懸架總成,。經(jīng)過感知硬件實時采集環(huán)境數(shù)據(jù)與智能駕駛算法計算后,,預(yù)先調(diào)節(jié)執(zhí)行各總成的控制參數(shù),以實現(xiàn)驅(qū)動力精 確控制,、轉(zhuǎn)向力自適應(yīng)調(diào)節(jié),、懸架剛度與阻尼實時優(yōu)化,以及制動系統(tǒng)快速響應(yīng)等多樣化場景需求,,全方位提升駕駛安全性與舒適性,。
二、車端推理
隨著智能駕駛場景越來越復(fù)雜,,需要更多的傳感器來滿足不同的場景要求,,對于車端推理算法的要求也就越來越高。一是車端推理模型需要具備多傳感器,、多模態(tài)的感知數(shù)據(jù)的并行處理能力,。二是在車端推理模型與云端訓(xùn)練模型的協(xié)同上,需使用專用智能駕駛云端模型提升運行效率,,如以開源通用語言大模型為基模型進(jìn)行二次訓(xùn)練與蒸餾出的智能駕駛模型,,解決模型臃腫導(dǎo)致的效率低、時延大的問題,。
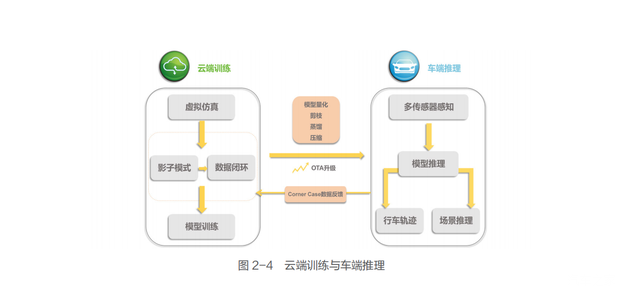
車端智能駕駛算法的實時推理計算,,會輸出兩大類信息:
(1)軌跡生成:精確指揮自車當(dāng)前執(zhí)行硬件的操作,包括方向,、速度,、懸架等,實現(xiàn)對自車的精確控制,。
(2)場景理解:預(yù)測接下來幾秒內(nèi),,自車或其他交通參與要素的運動軌跡,用于人機(jī)交互顯示,,以提升人機(jī)信任度與協(xié)同,。
三,、云端訓(xùn)練
在云端超算集群通過分布式架構(gòu)訓(xùn)練端到端神經(jīng)網(wǎng)絡(luò)模型,結(jié)合強(qiáng)化學(xué)習(xí)優(yōu)化復(fù)雜決策策略,,并通過模型量化,、剪枝、蒸餾,、壓縮等技術(shù)實現(xiàn)輕量化,,適配車載算力平臺。
在訓(xùn)練中,,數(shù)據(jù)質(zhì)量是算法優(yōu)化的底層支撐,。在汽車數(shù)據(jù)訓(xùn)練體系中,數(shù)據(jù)作為算法迭代的核心生產(chǎn)要素,,需滿足規(guī)模性,、準(zhǔn)確性、多樣性三大核心要求,,共同構(gòu)建模型泛化能力的底層數(shù)據(jù)基座,。
訓(xùn)練芯片是通過高并發(fā)的計算單元,對海量輸入數(shù)據(jù)進(jìn)行高效的深度學(xué)習(xí),,形成包括大規(guī)模參數(shù)的神經(jīng)網(wǎng)絡(luò)模型,通常采用大規(guī)模的并行計算陣列,,以支持大量的矩陣運算和數(shù)據(jù)處理,。在智能駕駛領(lǐng)域,芯片的功能細(xì)分與協(xié)同運作是實現(xiàn)高效決策的核心技術(shù)支撐,,主要分為三種:中央處理器 CPU,、圖形處理器 GPU、是神經(jīng)網(wǎng)絡(luò)處理器NPU,。云端算力是智能駕駛算法模型長期演進(jìn)與迭代以及未來實現(xiàn)自動駕駛的重要保障,,尤其是面對 AI 芯片被封鎖與制裁的背景下,云端算力儲備越多越好,,但行業(yè)需澄清的幾個算力誤區(qū):
1,、行業(yè)應(yīng)避免單位濫用導(dǎo)致的技術(shù)參數(shù)失真
2、消費者需要辨別云端算力實際情況
3,、云端大算力不代表車端更新速度
當(dāng)前汽車行業(yè)云端算力標(biāo)注存在概念模糊等誤導(dǎo)性表述問題,,因前綴單位差異(T/P/E/Z 級)導(dǎo)致終端用戶對算力規(guī)模產(chǎn)生認(rèn)知偏差,行業(yè)亟需基于算力應(yīng)用場景規(guī)范單位使用體系,。
|
浮點運算單位對比 |
|||||
|
算力名稱 |
FLOPS |
TFLOPS |
PFLOPS |
EFLOPS |
ZFLOPS |
|
名詞解釋 |
浮點運算性能指 |
浮點運算性能指標(biāo); |
浮點運算性能指標(biāo),; |
浮點運算性能指標(biāo),; |
浮點運算性能指標(biāo),; |
|
應(yīng)用場景 |
基礎(chǔ)單位,用于 |
消費級算力核心單 |
工業(yè)級超算與中型 |
大規(guī)模 AI 訓(xùn)練標(biāo) |
前沿科研與未來算 |
另外,,此白皮書還針對智能駕駛行業(yè)賦能與場景創(chuàng)新,、自動駕駛安全體系、智能駕駛產(chǎn)業(yè)環(huán)境與生態(tài)構(gòu)建,、智能駕駛產(chǎn)業(yè)未來展望方面進(jìn)行了闡述,。倡導(dǎo)從政策端完善法律法規(guī)體系、營造良好的創(chuàng)新環(huán)境,;在產(chǎn)業(yè)端構(gòu)建協(xié)同創(chuàng)新生態(tài),、聚焦核心技術(shù)攻關(guān)、構(gòu)建風(fēng)險共擔(dān)體系,;在消費端提升消費者認(rèn)知與教育,、加強(qiáng)消費者權(quán)益保護(hù),構(gòu)建完善的售后服務(wù)體系,。
