═µ▐D(zhu©Żn)╦─“ī(q©▒)Ż©11Ż® ŲüåSUVĄ─╦─“ī(q©▒)╝╝ąg(sh©┤)ųvĮŌ
Ī± Ųüå¬{┼▄╦─“ī(q©▒)╝╝ąg(sh©┤)
ĪĪĪĪ¬{┼▄ōĒėą│÷╔½Ą─╣½┬Ęąą±éąį─▄Ż¼ļm╚╗▓╗╩Ūę╗▌vīŻśI(y©©)Ą─įĮę░▄ć,Ż¼Ą½╩ŪĄū▒P║═╦─“ī(q©▒)ŽĄĮy(t©»ng)▀Ć╩Ū┐╔ęįÄ═ų·▀@▌vSUVæ¬(y©®ng)ĖČ╔│╩»,Īó─ÓĄžĄ╚Å═(f©┤)ļs┬Ę├µĄ─╠¶æ(zh©żn)ĪŻ╦³─ŪļŖūė▀mĢr(sh©¬)╦─“ī(q©▒)ŽĄĮy(t©»ng)─▄ē“Ė∙ō■(j©┤)┬Ęør▀M(j©¼n)ąąŪ░║¾“ī(q©▒)äė(d©░ng)┴”Ą─Ęų┼õ,Ż¼▀@¤oę╔čėš╣┴╦¬{┼▄Ą─ąąäė(d©░ng)┐šķg,ĪŻ
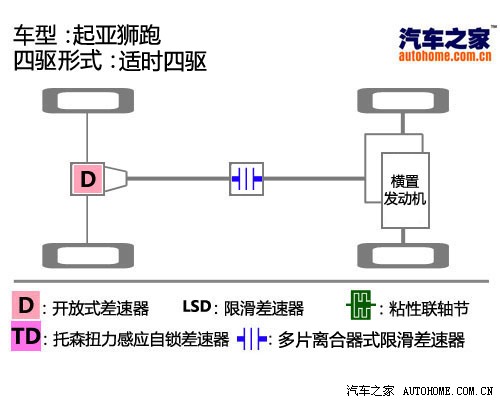

ĪĪĪĪ¬{┼▄ļŖ┐ž╦─“ī(q©▒)é„äė(d©░ng)ŽĄĮy(t©»ng)╩ŪļŖ┐žČÓŲ¼ļx║Ž▓Ņ╦┘Ų„Ż¼╦³▒Š┘|(zh©¼)╔Ž╩Ūę╗éĆ(g©©)ÖC(j©®)ąĄĄ─ĮY(ji©”)śŗ(g©░u),ĪŻČÓŲ¼ļx║ŽŲ„Įėė|├µ║▄ČÓ,Ż¼╚~Ų¼╗źŽÓĮ╗▓µŻ¼«ö(d©Īng)┐žųŲą┼╠¢(h©żo)│÷¼F(xi©żn)Ģr(sh©¬),Ż¼Į╗▓µ╚~Ų¼ŽÓ╗ź▒¦Šo,Ż¼Å─Č°▀_(d©ó)ĄĮĮ³║§äéąįĄ─é„äė(d©░ng)ĪŻø]ėą┐žųŲą┼╠¢(h©żo)│÷¼F(xi©żn)Ģr(sh©¬),Ż¼╚~Ų¼▒╦┤╦Ęųļx,Ż¼▄ć▌v╠Äė┌Ū░“ī(q©▒)ĀŅæB(t©żi)Ż¼įōŽĄĮy(t©»ng)┐╔Ė∙ō■(j©┤)▄ć▌v┤“╗¼ĀŅørīóäė(d©░ng)┴”į┌Ū░║¾▌åų«ķgęį└ĒšōųĄ100Ż║0ų┴50Ż║50▌ö│÷,ĪŻ

ĪĪĪĪė╔ė┌╩ŪļŖūė┐žųŲ,Ż¼▀@ĘNŽĄĮy(t©»ng)ę▓ę¬▒╚CRV─ŪĘNš│ąį┬ō(li©ón)▌S╣Ø(ji©”)(ĘŪäéąį▀BĮė)Ę┤æ¬(y©®ng)╦┘Č╚┐ņĄ├ČÓĪŻ¬{┼▄Ą─ŽĄĮy(t©»ng)▀ĆŠ▀éõ┴╦╩ųäė(d©░ng)ļŖūė─ŻöMµių╣,Ż¼└Ēšō╔Žīóäė(d©░ng)┴”▌ö│÷µiČ©į┌Ū░║¾50Ż║50,Ż¼ī”(du©¼)▄ć▌vĄ─įĮę░─▄┴”ėąę╗Č©Ą─į÷ÅŖ(qi©óng)Ż╗į┌▄ć╦┘│¼▀^40KM/HĢr(sh©¬),Ż¼ūįäė(d©░ng)ĮŌ│²╦─“ī(q©▒)µių╣,Ż¼╗ųÅ═(f©┤)Ū░“ī(q©▒)ĀŅæB(t©żi)ĪŻī”(du©¼)ė┌▀@ŅÉ╦─“ī(q©▒)ą╬╩Į,Ż¼▓┘ū„║å(ji©Żn)▒Ń▐D(zhu©Żn)ōQ║å(ji©Żn)å╬╩ŪŲõūŅ┤¾ā×(y©Łu)³c(di©Żn),ĪŻ

ĪĪĪĪ┼└Ų┬ĒŚ(xi©żng)─┐ųą,Ż¼2.7╔²░l(f©Ī)äė(d©░ng)ÖC(j©®)Ą─“ī(q©▒)äė(d©░ng)┴”┐╔ęį└Łų°¬{┼▄┼└ĄĮŲ┬ĒöŻ¼Ą½š¹éĆ(g©©)│╠▓ó▓╗╩Ū║▄╚▌ęū,ĪŻŠ┐ŲõįŁę“ų„ę¬╩Ū╦³╩╣ė├Ą─╦─“ī(q©▒)ŽĄĮy(t©»ng)▓ó▓╗─▄īŹ(sh©¬)¼F(xi©żn)šµš²Ą─ė▓▀BĮė,Ż¼Č°ŪęŲ┬├µĄ──Ó═┴▒╚▌^╦╔▄øĪó╦³╦∙čbéõĄ─╣½┬Ę▌å╠źĄ─ūźĄž┴”ę▓╩«ĘųėąŽ▐,Ż¼ī¦(d©Żo)ų┬¬{┼▄Ą─┼└Ų┬▀^│╠▓ó▓╗╦Ń╩Ū╠½Ēś└¹,Ż¼ųą═Š▀Ćė÷ĄĮ▓┐Ęų▄ć▌å│÷¼F(xi©żn)┤“╗¼Ą─¼F(xi©żn)Ž±ĪŻ╚ń╣¹▓╗╩ŪĦėąę╗Č©Ą─╦┘Č╚┼└Ų┬Ą─įÆ,Ż¼─Ū┐ų┼┬į┌▀@ĘNę░═ŌŁh(hu©ón)Š│Ž┬,Ż¼¬{┼▄║▄ļyĪ░ĄŪĒöĪ▒ĪŻ

ĪĪĪĪį┌įĮę░Ą─▀^│╠ųą═∙═∙Ģ■(hu©¼)ė÷ĄĮ▀@śėĄ─å¢Ņ},Ż¼─ŪŠ═╩Ūę╗é╚(c©©)▄ć▌åĢ■(hu©¼)ļxĄž,Ż¼┤╦Ģr(sh©¬)░l(f©Ī)╔·Ą─¼F(xi©żn)Ž¾╩ŪļxĄž▄ć▌åĢ■(hu©¼)▓╗═ŻĄž┐š▐D(zhu©Żn)Č°Ž¹║─äė(d©░ng)┴”Ż¼Č°┴Ēę╗é╚(c©©)ėąūźĄž┴”Ą─▄ć▌åę▓ø]ėą╩▄ĄĮĖ³ČÓäė(d©░ng)┴”Ą─Ęų┼õ,Ż¼ę“┤╦▄ć▌vŠ═ø]Ę©ö[├ō└¦Š│,ĪŻ▀@Š═╩Ū╬ęéāĮø(j©®ng)│ŻšfĄ─Į╗▓µ▌SŪķørŻ¼╦ūĘQĪ░┼┌ÅŚ┐ėĪ▒,ĪŻ╬ęéā?c©©)┌ŅA(y©┤)Ž╚£╩(zh©│n)éõ║├Ą─Į╗▓µ▌Sł÷(ch©Żng)Ąž╔Ž£y(c©©)įć¬{┼▄╦─“ī(q©▒)░µ▒Š▄ćą═,Ż¼═©▀^Į╗▓µ▌S┐╔ęį┴ŅŪ░║¾ś“Ė„ėąę╗éĆ(g©©)▄ć▌å╩¦╚źŻ©╗“Äū║§╩¦╚źŻ®ūźĄž┴”Ż¼Å─Č°ė^▓ņ▄ć▌v┼żŠžĘų┼õŪķør,Ż¼Öz£y(c©©)Ž▐╗¼╗“µių╣ÖC(j©®)śŗ(g©░u)Ą─╣żū„ą¦─▄,ĪŻ═©▀^īŹ(sh©¬)ļHĄ─£y(c©©)įć║¾Ż¼ė╔ė┌¬{┼▄ū¾ėę▄ć▌åų«ķgø]ėąŽ▐╗¼čbų├,Ż¼▌^Ą═Ą─ūźĄž┴”Ą─▄ć▌åĢ■(hu©¼)å╩╩¦┤¾┴┐┼żŠž,Ż¼ĮY(ji©”)╣¹┴Ņ¬{┼▄├µī”(du©¼)Į╗▓µ▌S’@Ą├╩°╩ų¤o▓▀Ż¼¤oĘ©├ōļx└¦Š│,ĪŻ
Ī± ░įõJĄ─╦─“ī(q©▒)ŽĄĮy(t©»ng)
ĪĪĪĪ░įõJ╩╣ė├Ą─╩Ū╠▌ą╬▄ć╝▄Ż©Ladder ChassisŻ®,Ż¼ī┘ė┌ĘŪ│ą▌d╩Į▄ć╔ĒŻ¼╦³ėąĄ─┴Ēę╗éĆ(g©©)Ė³×ķ╚╦╩ņų¬Ą─├¹ĘQĪ¬Ļć╩Į▄ć╝▄,Ż¼╩ŪūŅįń│÷¼F(xi©żn)Ą─▄ć╝▄ą╬╩Į,ĪŻ╠▌ą╬▄ć╝▄Ą─śėūėŠ═║├Ž¾ę╗ŚlŲĮ╠╔ų°Ą─╠▌ūėė╔ā╔Śl┐vŽ“Ą─ų„┴╗ĮY(ji©”)║ŽįSČÓ┤¾ąĪŻ©┤ų╝Ü(x©¼)Ż®▓╗═¼Ą─Ė▒ÖM┴║╦∙śŗ(g©░u)│╔Ą─,Ż¼ėąą®Ūķør▀ĆĢ■(hu©¼)╝ė╔Žą▒┴║ū„ņ¢╣╠,ĪŻ╠▌ą╬▄ć╝▄▄ć╔Ē║═Ąū▒PĘųļxĄ─įO(sh©©)ėŗ(j©¼)Ż¼▄ć╝▄║═▄ćÜżū„ĘŪ╣╠Č©▀BĮė,Ż¼Ęųļx╩Į▄ć╔ĒįO(sh©©)ėŗ(j©¼)š²║├ūĶų╣┴╦įĮę░▄ćąąū▀ė┌ŲķŹń┬Ę├µČ°«a(ch©Żn)╔·Ą─▄ćÜżĄ─┼żäė(d©░ng),ĪŻ
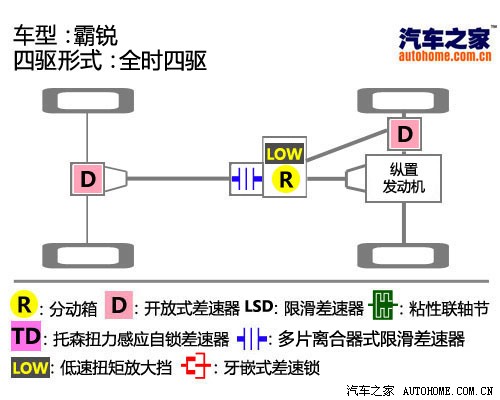


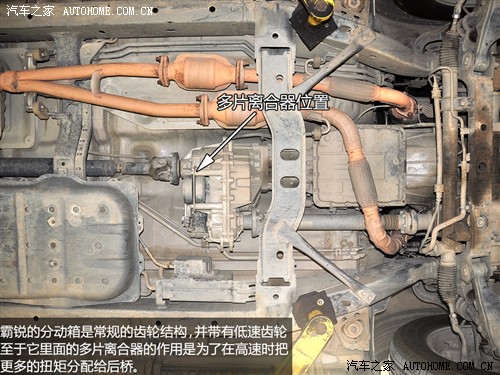
ĪĪĪĪ░įõJ╩╣ė├Ą─╩Ū╗∙ė┌║¾“ī(q©▒)ŲĮ┼_(t©ói)ķ_░l(f©Ī)Č°üĒŻ¼Ä¦ėąĘųäė(d©░ng)ŽõĄ═╦┘ō§Ż¼Š▀ėąųąčļ▓Ņ╦┘Ų„Ą─╚½Ģr(sh©¬)╦─“ī(q©▒)ŽĄĮy(t©»ng),Ż¼╦³┐╔ęįīŹ(sh©¬)¼F(xi©żn)│¼Ą═╦┘įĮę░ō§,ĪŻ╦³Ą─ļŖūė╦─“ī(q©▒)ŽĄĮy(t©»ng)ėąAUTOĪó4Hęį╝░4L╚²ĘN─Ż╩Į,Ż¼AUTOō§╬╗┐╔ęįūįäė(d©░ng)Ęų┼õŪ░║¾▌åĄ─äė(d©░ng)┴”,Ż¼4H╩ŪĖ▀╦┘╦─“ī(q©▒)Ön╬╗Ż¼4Lät╩Ūųąčļ▓Ņ╦┘Ų„µių╣Ą─Ą═╦┘ō§╬╗,ĪŻ

ĪĪĪĪČ°▀@╠ū▒╗Ųüå╣┘ĘĮĘQ×ķ╦─▌å“ī(q©▒)äė(d©░ng)Ż©TODų„äė(d©░ng)┼żŠžĘų┼õ┐žųŲŻ®ŽĄĮy(t©»ng)ę▓╩Ū╩ū┤╬į┌ĒnŽĄ▄ć╔Ž┼õéõŻ¼ę▓¾w¼F(xi©żn)┴╦░įõJūĘŪ¾╝āš²įĮę░Ą─Č©╬╗╚ĪŽ“,ĪŻĖ„ĘN─Ż╩Į═©▀^ę╗éĆ(g©©)ą²ŌoŪąōQ,Ż¼Ą½4HĄĮ4L▒žĒÜŽ╚īóūā╦┘Ų„ō§╬╗ÆņĄĮNō§▓┼─▄▓┘ū„ĪŻĄ╚ĄĮĄū▒Pé„üĒ▌p▌pĄ─Ī░åEĪ▒ę╗┬Ģ,Ż¼āx▒Ē▒PĄ─Ī░4WD LOWĪ▒ųĖ╩Š¤¶┴┴Ų,Ż¼▀@éĆ(g©©)ūŅÅŖ(qi©óng)Ą─įĮę░─Ż╩Į▓┼š²šµš²╔·ą¦ĪŻė╔ė┌į┌4Lō§╬╗Ą─Ģr(sh©¬)║“,Ż¼Ū░║¾ś“Ą─┼żŠžĘų┼õ╩Ū50:50,Ż¼▓óŪęųąčļµių╣Ż©į┌AUTOō§║═4Hō§Ą─Ģr(sh©¬)║“▓Ņ╦┘Ż®Ż¼ŽÓĻP(gu©Īn)┘Y┴Ž’@╩Š²X▒╚×ķ2.4:1,Ż¼▀@śėŠ═┐╔ęįėąą¦ĄžĘ┼┤¾┼żŠž,Ż¼╠ßĖ▀┼└Ų┬─▄┴”Ą╚ĪŻ



ĪĪĪĪō■(j©┤)┘Y┴Ž’@╩Š,Ż¼į┌AUTO─Ż╩ĮŽ┬Ģr(sh©¬)╦┘50╣½└’ā╚(n©©i)╦³Ģ■(hu©¼)ęį╦─“ī(q©▒)Ą──Ż╩Įąą±é,Ż¼Ą½«ö(d©Īng)Ģr(sh©¬)╦┘│¼▀^50╣½└’Ģr(sh©¬)Ż¼×ķ┴╦╣Ø(ji©”)ė═Ą─ąĶę¬╦─“ī(q©▒)ŽĄĮy(t©»ng)Ģ■(hu©¼)░čĖ³ČÓĄ─äė(d©░ng)┴”Ęų┼õĮo║¾ś“,Ż¼Ą½┤╦Ģr(sh©¬)╚į╚╗╩Ūęį╦─“ī(q©▒)─Ż╩Įąą±é,Ż¼ų╗╩ŪŪ░▌åĘų┼õĄĮĄ─äė(d©░ng)┴”ŽÓī”(du©¼)▌^╔┘ĪŻ

ĪĪĪĪĄ½▒žĒÜę¬ūóęŌĄ─╩Ū,Ż¼ė╔AUTO─Ż╩ĮŪąų┴4H─Ż╩ĮĢr(sh©¬),Ż¼▄ć╦┘ę¬į┌80km/hęįā╚(n©©i)▀M(j©¼n)ąą▓┘ū„ĪŻį┌4H─Ż╩ĮŽ┬ąą±é▄ć╦┘▒žĒÜę¬┐žųŲį┌80km/hęįā╚(n©©i),Ż¼Č°4L─Ż╩ĮŽ┬ätę¬Ģr(sh©¬)╦┘┐žųŲį┌40km/hęįŽ┬,ĪŻĘ±ätŻ¼Ä¦üĒĄ─║¾╣¹╩Ūōpē─╔§ų┴╩Ū¤²Ü¦ār(ji©ż)Ė±░║┘FĄ─Ęųäė(d©░ng)Žõ,ĪŻ


ĪĪĪĪį┌┼└Ų┬ĒŚ(xi©żng)─┐ųą,Ż¼Ą═╦┘╦─“ī(q©▒)ō§┼c3.8 V6░l(f©Ī)äė(d©░ng)ÖC(j©®)┤Ņ┼õ“ī(q©▒)äė(d©░ng)░įõJŽ“╔Ž┼└’@Ą├║┴▓╗┘M(f©©i)┴”ĪŻČ°«ö(d©Īng)Ūą╚ļAUTO─Ż╩Į║¾,Ż¼░įõJę¬┼└╔Ž╚źŠ═’@Ą├┘M(f©©i)┴”┴╦,Ż¼į┌┼└Ų┬Ą─▀^│╠ųąĢ■(hu©¼)▓╗Ģr(sh©¬)│÷¼F(xi©żn)▓┐Ęų▄ć▌å┤“╗¼Ą─ŪķørĪŻė╔ė┌ļŖ─Xé╔£y(c©©)ĄĮ▄ć▌å┤“╗¼║¾Įķ╚ļĄ─╦┘Č╚▒╚▌^┐ņ,Ż¼┤╦Ģr(sh©¬)ŽĄĮy(t©»ng)Ģ■(hu©¼)š{(di©żo)š¹äė(d©░ng)┴”Ą─Ęų┼õ,Ż¼ę“┤╦▄ć▌åį┌┼└Ų┬▀^│╠ųą┤“╗¼Ą─Ģr(sh©¬)ķg▓ó▓╗╩Ū╠½ķL,Ż¼Ą½╩Ūį┌AUTO─Ż╩ĮŽ┬░įõJ┼└Ų┬Ģr(sh©¬)Š═’@Ą├┐─┐─┼÷┼÷┴╦ĪŻų┴ė┌į┌Į╗▓µ▌SĒŚ(xi©żng)─┐£y(c©©)įć?y©ón)’├�,Ż¼ė╔ė┌ū¾ėę▄ć▌åų«ķgø]ėąŽ▐╗¼čbų├,Ż¼▌^Ą═Ą─ūźĄž┴”Ą─▄ć▌åĢ■(hu©¼)å╩╩¦┤¾┴┐┼żŠžŻ¼ĮY(ji©”)╣¹┴Ņ░įõJ├µī”(du©¼)Į╗▓µ▌S’@Ą├╩°╩ų¤o▓▀,�,Ż┐éĄ─üĒšfŻ¼░įõJ├µī”(du©¼)ę╗ą®┬Ęør▓ó▓╗╩Ū╠½Å═(f©┤)ļsĄ─įĮę░┬Ę├µĢr(sh©¬)╩Ū┐╔ęį═©▀^Ą─,Ż¼Ą½├µī”(du©¼)▀^ė┌Å═(f©┤)ļsĄ─įĮę░┬Ę├µĄ─Ģr(sh©¬)║“╦³Š═Ģ■(hu©¼)’@Ą├╩°╩ų¤o▓▀┴╦,Ż¼į┌įĮę░ĘĮ├µų╗─▄šf╩ŪėąØō┘|(zh©¼)Ą─▄ćą═ĪŻ
Ī± ┐éĮY(ji©”)Ż║
ĪĪĪĪū„×ķĒnć°Ą─Ų¹▄ćŲĘ┼Ų,Ż¼ŲüåŲ¹▄ć╔µūŃSUVŅI(l©½ng)ė“Ą─Ģr(sh©¬)ķg▓ó▓╗╦ŃķL,Ż¼ŽÓī”(du©¼)Ųõ╦¹ÜWŽĄŲĘ┼ŲSUVüĒšf╦³ėąų°ār(ji©ż)Ė±ĘĮ├µĄ─ā×(y©Łu)ä▌(sh©¼)ĪŻ│²┴╦░įõJ═Ō,Ż¼¬{┼▄║═╦„╠m═ąČ╝ŅH╩▄ć°ā╚(n©©i)Ž¹┘M(f©©i)š▀Ą─ŪÓ▓A,ĪŻÅ─╦³Ą─╦─“ī(q©▒)ŽĄĮy(t©»ng)║═£y(c©©)įćĄ─ŪķørüĒ┐┤Ż¼¬{┼▄║═╦„╠m═ą╩Ūų°ųžŲ½Ž“ė┌│Ū╩ą±{±éĄ─SUV,Ż¼ę“┤╦╦³éāĄ─įĮę░ąį─▄▓ó▓╗│÷▒Ŗ,Ż¼╦³éāĄ─╦─“ī(q©▒)ŽĄĮy(t©»ng)Ė³ČÓ╩Ūė├ė┌╠ß╣®ŲĮĘĆ(w©¦n)Īó░▓╚½Ą─╚š│Ż±{±é,Ż¼įĮę░▀@ųž?f©┤)?d©Īn)╦³éā▓ó▓╗─▄║▄║├Ąž┐ĖŲüĒ,ĪŻČ°ū„×ķŲüåĒö╝ē(j©¬)SUV▄ćą═Ą─░įõJŻ¼╦³ėąų°ŽÓī”(du©¼)═¼éāąųĄ▄Ė³ÅŖ(qi©óng)┤¾Ą─╦─“ī(q©▒)ŽĄĮy(t©»ng),Ż¼ę“┤╦╦³▓╗āH┐╔ęį╠ß╣®Ė³ŲĮĘĆ(w©¦n),ĪóĖ³░▓╚½Ą─╚š│Żąą±éŻ¼▀Ć┐╔ęį×ķ─ŃĄ─įĮę░Ħ┴╦ę╗³c(di©Żn)Ą─śĘ╚ż,Ż¼Ą½╠½Å═(f©┤)ļsĄ─įĮę░┬Ę├µę▓▓ó▓╗╩Ū╦³╦∙─▄│ą╩▄Ą─,Ż¼«ģŠ╣╦³▒ŠüĒĄ─įO(sh©©)ėŗ(j©¼)Š═▓╗╩Ūė├ū„įĮę░Ą─ė├═ŠĪŻ╚ń╣¹─Ń╩Ūę╗éĆ(g©©)▀^ė┌ūĘŪ¾įĮę░Ą─░l(f©Ī)¤²ėč,Ż¼š¹╠ņ±{▄ć╚ź┼╩╔Į╔µ╦«Ą─įÆ,Ż¼─ŪŲüåĄ─SUV▓ó▓╗Ę¹║Ž─ŃĄ─ę¬Ū¾Ż¼Ą½╬ęŽÓą┼─Ūą®╝ā┤Ō═µįĮę░Ą─▄ćę▓Į^▓╗─▄╠ß╣®Įo─ŃŲüåSUV─ŪĘN╩µ▀mĄ─Ėą╩▄,ĪŻŻ©╬─/Ų¹▄ćų«╝ę ║╬╝ęśs ┘Y┴Ž╦č╝»/š¹└Ē ║╬╝ęśs äóĀNŻ®
╗∙ĄA(ch©│)ų¬ūR(sh©¬)")
╬─š┬ś╦(bi©Īo)║ׯ║
╦─“ī(q©▒)įöĮŌ
╩š▓ž
+1
┘Ø
+1
▓╚
═Ų╦]ķåūx


ūŅą┬╬─š┬
 ╝ė▌dųą
╝ė▌dųą





║├įu(p©¬ng)└Ēė╔Ż║
▓Ņįu(p©¬ng)└Ēė╔Ż║