
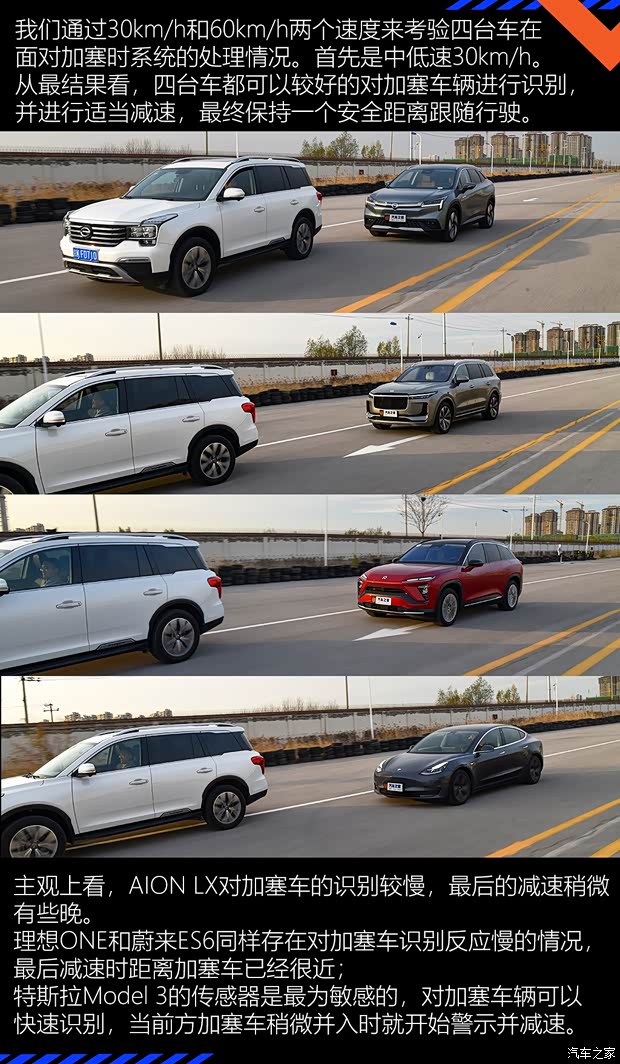
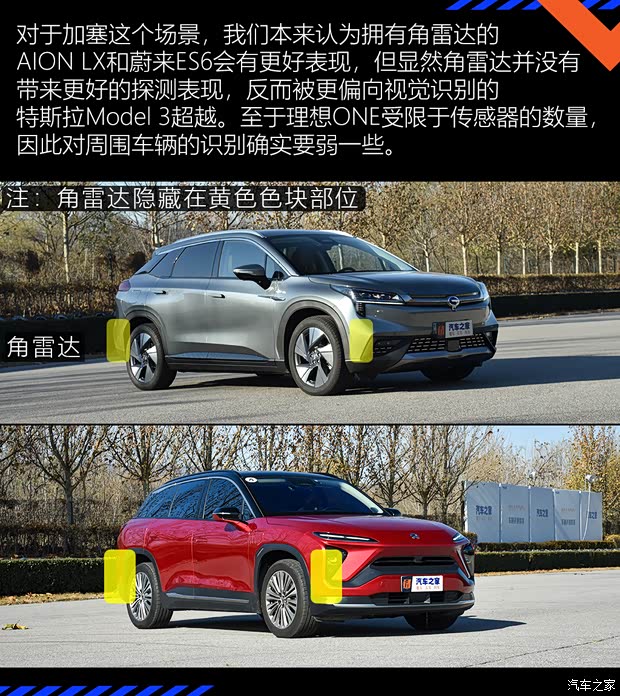
加塞是我們平常開車時(shí)很容易見到的情況,,即使人類駕駛員也容易因?yàn)榉磻?yīng)不及時(shí)而發(fā)生剮蹭,。對于智能汽車來說,這種情況對系統(tǒng)的考驗(yàn)更大,,無論是硬件的識別能力還是系統(tǒng)的處理,,兩者都不能掉鏈子,才能保證熟練的處理加塞場景,。



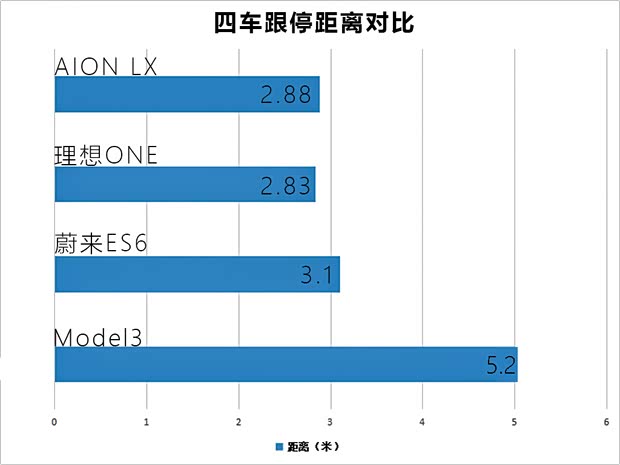
然后我們來看看這四臺車的最近跟車距離,。我們將駕駛輔助系統(tǒng)的跟車距離都調(diào)整為最近,那么跟車距離越近,,被加塞的概率就越低,。理想ONE取得了第一名,它的跟車距離在2.83米,,特斯拉Model 3最夸張,,跟車距離超過5m。蔚來ES6最近跟車距離是3.1米,,特斯拉Model 3是5.2米,,理想ONE是2.83米,埃安LX是2.88米,。

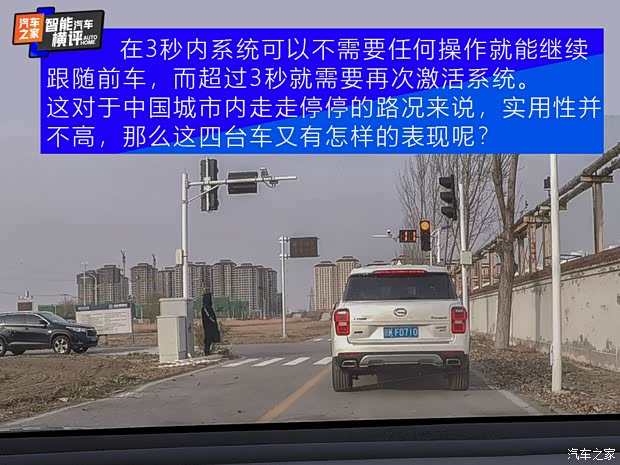
紅綠燈跟走本質(zhì)上也是考驗(yàn)了駕駛輔助系統(tǒng)跟車的能力,,通常情況下很多車企都是以3秒作為臨界點(diǎn)。


提起追尾測試,,大家可能會聯(lián)想到我們之前的主動緊急制動系列測試,,但這里的高速追尾是指在駕駛輔助狀態(tài)下(也就是開啟ACC)的高速追尾。我們在前方設(shè)置了靜態(tài)的停止車輛,,測試車在開啟ACC自適應(yīng)巡航或者領(lǐng)航輔助狀態(tài)下,,以80km/h的速度追尾前車。
實(shí)際上,,這種場景在高速公路上并不少見,尤其在匝道口或者高速公路堵車時(shí)經(jīng)常會出現(xiàn),,這對駕駛輔助系統(tǒng)提出了一個(gè)較高的要求,。

從測試結(jié)果上看,四臺車在面對這種危險(xiǎn)情況時(shí)表現(xiàn)都不錯(cuò),,不過表現(xiàn)方式各有不同,。AION LX,、理想ONE、蔚來ES6都能做到前段線性剎車,,不過AION LX和理想ONE在最后會有激發(fā)主動緊急制動的情況,,而蔚來ES6在低于10km/h之后會放開剎車,回歸到駕駛員控制的狀態(tài),;
只有特斯拉Model 3在整個(gè)過程都是平穩(wěn)剎車的狀態(tài),,而且在距離前車大概100米之外就會減速,最終也不會觸發(fā)主動緊急制動,,表現(xiàn)最好,。

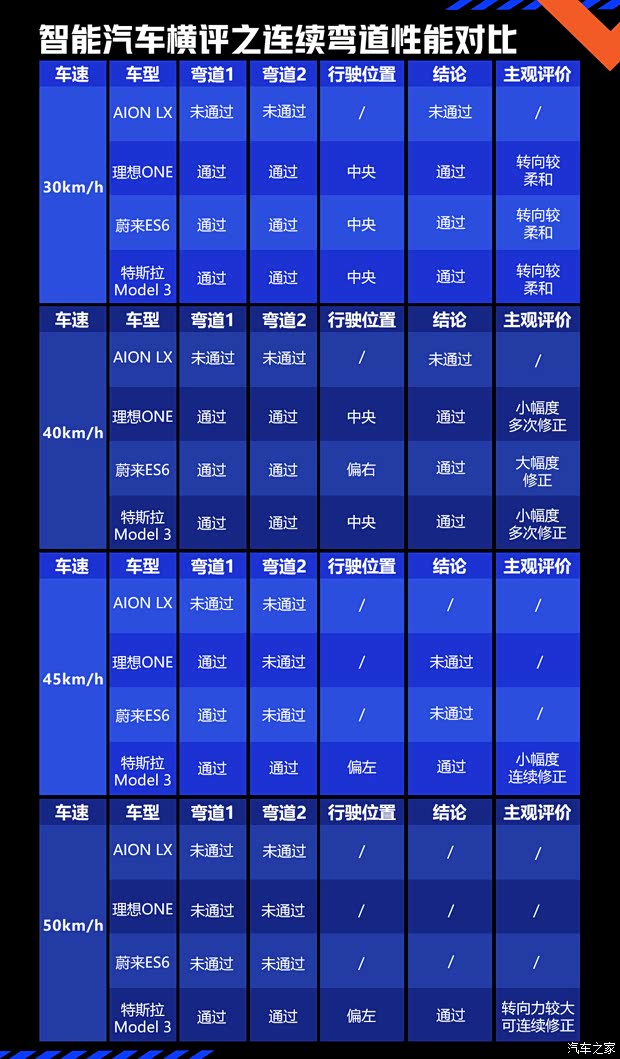
彎道場景主要考察車輛的車道保持能力,其實(shí)從技術(shù)上看,,車道保持會系統(tǒng)的要求還是比較高的,,駕駛輔助系統(tǒng)既需要進(jìn)行橫向控制,也需要進(jìn)行縱向控制,。我們設(shè)置了三個(gè)速度(30km/h/40km/h/50km/h)來通過同一個(gè)彎道,,以此考察四臺車的車道保持能力。

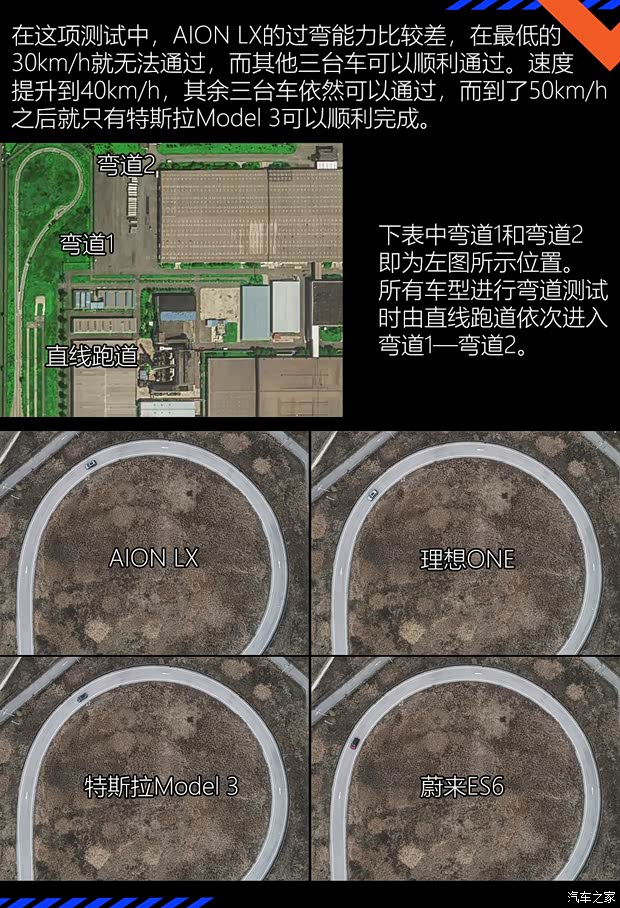
在主觀感受方面,,理想ONE對車道線的識別很精準(zhǔn),,經(jīng)過彎道時(shí)車輛在車道中間行駛,當(dāng)通過彎道的時(shí)速較高時(shí),,系統(tǒng)退出時(shí)會有明顯的聲音和圖像提示,,同時(shí)系統(tǒng)也會進(jìn)行一定的降速。
蔚來ES6同樣會即使的提醒駕駛員接管,,不過在通過彎道時(shí)會比較偏向車道的右側(cè),,而特斯拉Model 3在通過彎道時(shí)會略微偏左,同時(shí)也會在彎心有3km/h的降速措施,。
測試場中的彎道半徑為50m,,這在日常的道路上只有很急的匝道才會有這樣的設(shè)計(jì),而且一般的限速也在30km/h以下,,理想ONE,、蔚來ES6以及特斯拉Model 3能夠以這樣的速度通過測試場彎道,那么在面對日常道路上的一般彎道應(yīng)該都不會有太大的問題,。

在高速道路上,,養(yǎng)護(hù)工人經(jīng)常會在修路的時(shí)候布置樁桶,并進(jìn)行引流,。那么當(dāng)駕駛輔助系統(tǒng)遇到樁桶這種情況時(shí)會有怎樣的應(yīng)對措施呢,?


其他三臺車面對前方的樁桶都沒有反應(yīng),顯然在多場景應(yīng)用上,,這三臺車并不如特斯拉考慮的更加周全,。
